Zmena vzorkovacej frekvencie s ľubovoľným faktorm
13. August, 2014, Autor článku: Jacko Martin, Elektrotechnika
Ročník 7, číslo 8  Pridať príspevok
Pridať príspevok
![]() Článok sa venuje zmene vzorkovacej frekvencie fx vstupného diskrétneho signálu s ľubovoľným faktorom. Výsledkom je výstupný diskrétny signál s novou vzorkovacou frekvenciou fy. Zmena vzorkovacej frekvencie sa dosiahneme použitím metódy číslicového spracovania signálov známej vo všeobecnosti ako interpolácia. Pre výpočet interpolovanej vzorky v danom časovom okamžiku sa pritom používa len niekoľko vzoriek vstupného diskrétneho signálu z blízkeho okolia tohto okamžiku.
Článok sa venuje zmene vzorkovacej frekvencie fx vstupného diskrétneho signálu s ľubovoľným faktorom. Výsledkom je výstupný diskrétny signál s novou vzorkovacou frekvenciou fy. Zmena vzorkovacej frekvencie sa dosiahneme použitím metódy číslicového spracovania signálov známej vo všeobecnosti ako interpolácia. Pre výpočet interpolovanej vzorky v danom časovom okamžiku sa pritom používa len niekoľko vzoriek vstupného diskrétneho signálu z blízkeho okolia tohto okamžiku.
Vykonali sme prevzorkovanie vstupného diskrétneho signálu interpolačnými metódami pomocou kubického splajnu definovaného v Matlabe funkciou spline, ďalej pomocou Lagrangeových polynómov tretieho stupňa a Farrowovej štruktúry. Pre vyhodnotenie presnosti prevzorkovania sme vypočítali strednú kvadratickú chybu. Vo všeobecnosti je tento prístup použiteľný, keď pomer fx/fy je racionálne, alebo iracionálne číslo a je vhodný pre zvýšenie ako aj zníženie vzorkovacej frekvencie.
1. Úvod
Mnoho diskrétnych systémov so zmenou vzorkovacej frekvencie našlo svoje uplatnenie medzi modernými algoritmami pre číslicové spracovanie signálov vzhľadom k svojej vysokej výpočtovej efektívnosti zvlášť v spojení s implementáciou na signálovom procesore. Takéto systémy pracujúce s viacerými vzorkovacími frekvenciami sú známe ako mnohorýchlostné systémy [1-5]. Svoje uplatnenie nachádzajú v mnohých oblastiach ako sú komunikačné systémy, spracovanie reči, simulácia akustiky miestnosti využívajúca wavelety, kompresia obrazu, anténne systémy, radarové systémy, systémy utajovania hovorov, transmultiplexory, senzorové systémy, modely pre návrh architektúry mikroelektronických obvodov atď. [6].
Typickým príkladom využitia zmeny vzorkovacej frekvencie je konverzia hudobných záznamov, spracovaných v hudobných štúdiách (vzorkovacia frekvencia býva fv=48 [kHz] alebo fv=96 [kHz] a ich ukladanie na kompaktný disk (CD), kde sa používa vzorkovacia frekvencia fv=44,1 [kHz]. Riešenie by mohlo byť zdánlivo jednoduché. Digitálny záznam by sme previedli spätne na analógový signál a ten by sme potom znovu vzorkovali s novou vzokovacou frekvenciou. Pri analógovo číslicovom (A/Č) a číslicovo analógovom (Č/A) prevode môžu byť zavedené také závažné chyby a rušenia, že po vykonaní tohoto postupu je výsledný signál takmer nepoužiteľný. Ďaleko výhodnejšie je zmeniť vzorkovaciu frekvenciu priamo u diskrétneho alebo číslicového signálu.
2. Interpolácia v časovej oblasti
Nové hodnoty vzoriek môžu byť vypočítané v ľubovoľných časových okamžikoch využitím metódy číslicového spracovania signálu, techniky známej všeobecne ako interpolácia. Filter realizujúci túto interpoláciu sa jednoducho nazýva interpolátor [7]. Na interpoláciu s ľubovoľným faktorom sa môžeme pozerať ako na výpočet nových vzoriek v ľubovoľných bodoch (časových okamžikoch) medzi existujúcimi vzorkami. Koncepcia je uvedená na obr.1. Vstupná postupnosť …, x((nℓ -2)Tx), x((nℓ -1)Tx), x(nℓ Tx), x((nℓ +1)Tx), x((nℓ+2)Tx), … je vytvorená z rovnomerne rozložených vzoriek so vzorkovacou periódou . Nová vzorka y(ℓTy), nazývaná interpolant sa nachádza v bode ℓTy=nℓTy+μℓTx medzi vzorkami x(nℓTx) a x((nℓ+1)Tx). Index vstupnej vzorky nℓ sa nazýva základný index a μℓ index zlomkového intervalu.
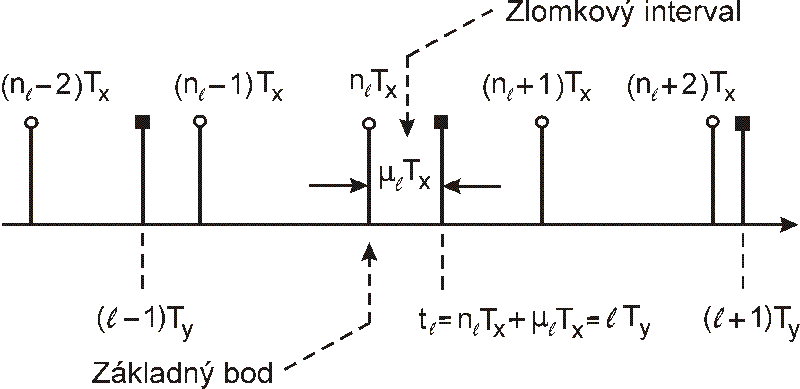
Obr. 1 Vzťahy medzi vstupnou postupnosťou a interpolovanou postupnosťou v časovej oblasti, krúžok – vstupné vzorky, štvorec – výstupné vzorky.
Index vstupnej vzorky nℓ sa nazýva základný index a μℓ index zlomkového intervalu, ktorý môže nadobudnúť ľubovoľnú hodnotu v rozsahu 0 ≤ μℓ < 1. Nová hodnota vzorky y(ℓTy) sa vypočíta z existujúcich vzoriek použitím interpolačného algoritmu. Na obr.2 môžeme vidieť algotitmus interpolácie. Pre daný vstupný signálu x(n), výstupná vzorka y[ℓ] sa vypočíta použitím interpolačného algoritmu pre index vstupnej vzorky nℓ a pre index zlomkového intervalu μℓ. Interpolačný algoritmus môžeme definovať ako časovo premenný číslicový filter s impulznou odozvou h(nℓ, μℓ). Nová vzorka y(tℓ)=y(ℓTy) je umiestnená medzi vstupnými vzorkami x(nℓTx) a x((nℓ+1)Tx) v čase tℓ, ktorú vyjadríme pomocou vstupnej vzorkovacej periódy Tx, indexu vstupnej vzorky nℓ a indexu zlomkového intervalu μℓ, ako to vidno na obr.1.
T_x") |
(1) |
Pre časový okamžik μℓ je index vstupnej vzorky nℓ určený takto
![n_{\iota} = [t_{\iota} / T_x]](http://s0.wp.com/latex.php?latex=n_%7B%5Ciota%7D+%3D+%5Bt_%7B%5Ciota%7D+%2F+T_x%5D&bg=ffffff&fg=000000&s=0 "n_{\iota} = [t_{\iota} / T_x]") |
(2) |
a index zlomkového intervalu
![\mu_{\iota} = t_{\iota} / T_x - [t_{\iota} / T_x]](http://s0.wp.com/latex.php?latex=%5Cmu_%7B%5Ciota%7D+%3D+t_%7B%5Ciota%7D+%2F+T_x+-+%5Bt_%7B%5Ciota%7D+%2F+T_x%5D&bg=ffffff&fg=000000&s=0 "\mu_{\iota} = t_{\iota} / T_x - [t_{\iota} / T_x]") |
(3) |
kde [x] predstavuje celočíselnú časť z x. Uvažujme postupnosť x(n) ako diskrétny signál získaný vzorkovaním spojitého signálu xc(t) s frekvenčne ohraničeným spektrom, ktorého vzorkovacia perióda je Tx
![x[n] = x_c(nT_x)](http://s0.wp.com/latex.php?latex=x%5Bn%5D+%3D+x_c%28nT_x%29&bg=ffffff&fg=000000&s=0 "x[n] = x_c(nT_x)") |
(4) |
Ideálnu interpoláciu si môžeme predstaviť ako vzorkovanie xc(t) v časovom okamžiku tℓ, z čoho vlastne dostaneme interpolant y[ℓ]= xc(tℓ). Pre dosiahnutie predpokladaného ideálneho prípadu je potrebné ideálne obnoviť spojitý signál xc(t) zo vzoriek x(n) a prevzorkovať obnovený signál v časovom okamžiku tℓ. V skutočnosti generujeme aproximovaný signál yc(t) a určíme interpolant y[ℓ] pomocou vzorkovania yc(t) v časovom okamžiku tℓ [8]
![y[ \iota ] = y_c(t_{\iota }) = y_c((n_{\iota } + \mu_{\iota })T_x)](http://s0.wp.com/latex.php?latex=y%5B+%5Ciota+%5D+%3D+y_c%28t_%7B%5Ciota+%7D%29+%3D+y_c%28%28n_%7B%5Ciota+%7D+%2B+%5Cmu_%7B%5Ciota+%7D%29T_x%29&bg=ffffff&fg=000000&s=0 "y[ \iota ] = y_c(t_{\iota }) = y_c((n_{\iota } + \mu_{\iota })T_x)") |
(5) |
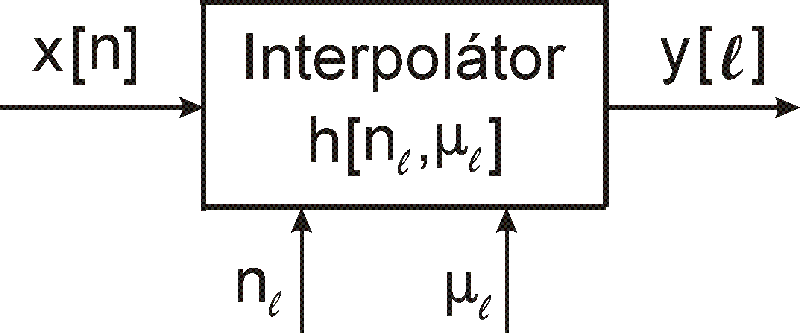
Obr. 2 Zjednodušený model všeobecného interpolátora.
Z toho dôvodu, problém interpolácie môže byť považovaný ako problém rekonštrukcie. V skutočnosti používame interpolačný algoritmus na vytvorenie časovo spojitého signálu yc(t) z konečného počtu egzistujúcich vzoriek x[n]. Použijeme interval N=N2+N1+1 po sebe idúcich vzoriek v okolí vzorky s indexom vstupnej vzorky takým spôsobom, že – N1+nℓ ≤ nℓ ≤ nℓ+N2. Zvyčajne používané interpolačné metódy sú založené na polynomiálnych aproximáciách. V tomto prípade pre postupnosť vstupných vzoriek {x[-N1+nℓ], … ,x[nℓ], … , x[nℓ+N2]}, je polynomiálna aproximácia yc(t) signálu xc(t) definovaná takto
 = \sum_{k=-N_1}^{N_2} P_k (t) (n_{\iota } +k)") |
(6) |
kde Pk(t) sú polynómy. Vo väčšine aplikácií sa používajú dva všeobecné druhy polynómov: Lagrangeove polynómy a B-splajnové funkcie. Ďalej ukážeme proces interpolácie na základe Lagrangeových polynómov. Lagrangeove polynómy Pk(t) sú dané vzťahom
 = \prod_{i=-N_1 , i \neq k}^{N_2} \frac{t-t_i}{t_k - t_i}, \; k=-N_1 , -N_1 +1, \dots N_2 -1, N_2") |
(6) |
Stupeň polynómu Pk(t) je N-1, pretože N=N2+N1+1. Ak zvolíme N=4, tak dostaneme Lagrangeove polynómy 3. rádu. Tento konkrétny prípad aproximácie sa nazýva aj kubická Lagrangeova interpolácia. Hlavnou charakteristikou Lagrangeovej aproximácie je presná rekonštrukcia hodnôt vstupných vzoriek. Je to dôsledok vlastnosti Langrangeových polynómov danej nasledovným vzťahom
 = \left \{ \begin{array}{l} 1, k=n \\ 0, k \neq n \end{array} \right . ,-N_1 \leq n \leq N_2") |
(8) |
ktorú keď aplikujeme v rov.(6) dostaneme
![y_c(nT_x) = x[n] , \; -N_1 \leq n \leq N_2](http://s0.wp.com/latex.php?latex=y_c%28nT_x%29+%3D+x%5Bn%5D+%2C+%5C%3B+-N_1+%5Cleq+n+%5Cleq+N_2&bg=ffffff&fg=000000&s=0 "y_c(nT_x) = x[n] , \; -N_1 \leq n \leq N_2") |
(9) |
Na obr.3 je zobrazená Lagrangeova kubická interpolácia. Zvolené štyri vstupné vzorky {x[nℓ-1], x[nℓ], x[nℓ+1], x[nℓ+2]} získame vzorkovaním časovo spojitého signálu xc(t) so vzorkovacou periódou Tx=10 ms. Vypočítame hodnotu vzorky y[ℓ] = y(tℓ), ktorá sa nachádza medzi vzorkami x(nℓTx), a x(nℓTx+1) v časovom okamžiku tℓ = nℓTx +(2/3)Tx. Pomocou rov.(7) vypočítame štyri Lagrangeove polynómy tretieho rádu. V tomto prípade sme zvolili N1=1 a N2=2, preto sú kubické Lagrangeove polynómy vypočítané pre k = -1, 0, 1, 2 a sú označené ako P-1(t), P0(t), P1(t) a P2(t) a sú zobrazené na Obr.3. Nakoniec použijeme rov.(6) pre výpočet hodnôt požadovaných vzoriek y[ℓ] = y(tℓ).
Z Obr.3 môžeme vidieť výsledný interpolant, označený čiarkovanou čiarou zakončenou štvorčekom je veľmi dobrou aproximáciou pôvodného spojitého signálu xc(t), pre časový okamžik t=tℓ. Ako bolo skôr uvedené, alternatívny prístup pre polynomiálnu interpoláciu je použitie B-splajnových funkcií. Pre splajnové funkcie sa v Matlabe používa funkcia spline.
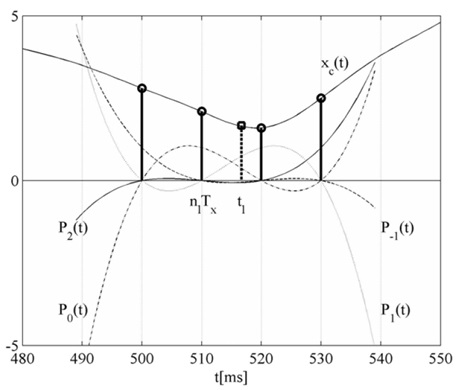
Obr. 3 Lagrangeova interpolácia s kubickými polynómami P-1(t), P0(t), P1(t), P2(t). Plné čiary zakončené prázdnym krúžkom predstavujú vstupné vzorky {x[nℓ-1], x[nℓ], x[nℓ+1], x[nℓ+2]} a čiarkovaná čiara s prázdnym štvorčekom na konci predstavuje výsledný interpolant y[ℓ]
Napríklad funkcia spline poskytuje interpoláciu s kubickou splajnovou funkciou. Príkaz:
yℓ = spline( t, x, tl );
vypočíta výstupné vzorky yℓ ako výsledok kubickej splajnovovej interpolácie pre vstupné premenné: t je vektor časových okamžikov vstupných vzoriek, x je vektor hodnôt vstupných vzoriek (má rovnakú dĺžku ako vektor t), tℓ je vektor časových okamžikov výstupných vzoriek.
3. Polynomiálna interpolácia založená na hybridnom analógovo – číslicovom modeli
Ako bolo predtým uvedené v kap.1, tak interpolácia môže byť považovaná v podstate za problém rekonštrukcie. Môžeme si predstaviť proces určenia interpolovaných hodnôt (interpolantu) ako postup dvoch krokov. V prvom kroku, aproximácia spojitého signálu yc(t) je založená na rekonštrukcii vzoriek existujúcej vstupnej postupnosti {x[n]}. V druhom kroku je yc(t) je vzorkovaný v požadovaných časových okamžikoch. Hybridný analógovo-číslicový model pre rekonštrukciu signálu a prevzorkovanie je zobrazený na obr.4.
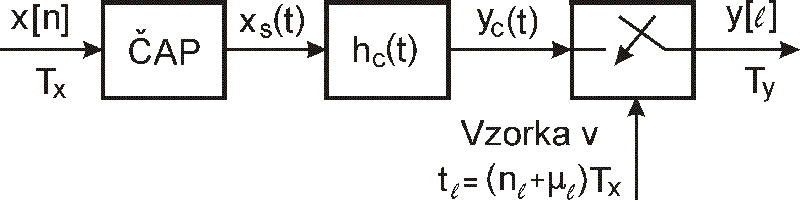
Obr. 4 Hybridný analógovo/číslicový model pre interpoláciu.
Spojitý signál yc(t) je rekonštruovaný použitím číslicovo-analógového prevodníka (ČAP) a rekonštrukčného analógového filtra hc(t). Výstupná vzorka y[ℓ] je získaná vzorkovaním yc(t) v čase tℓ = nℓTx+ μℓTx. Ako bude ďalej ukázane, tak veľmi efektívny interpolačný algoritmus môže byť získaný napodobnením hybridného modelu z obr.4. Uvažujme spracovanie signálu pomocou hybridného modelu na obr.4. Ideálny ČAP konvertuje postupnosť {x[n]} na postupnosť xs(t) pozostávajúcu z váhovaných a posunutých spojitých impulzov
![x_s (t) = \sum_{n=- \infty}^{\infty} x[n] \delta (t-nT_x)](http://s0.wp.com/latex.php?latex=x_s+%28t%29+%3D+%5Csum_%7Bn%3D-+%5Cinfty%7D%5E%7B%5Cinfty%7D+x%5Bn%5D+%5Cdelta+%28t-nT_x%29&bg=ffffff&fg=000000&s=0 "x_s (t) = \sum_{n=- \infty}^{\infty} x[n] \delta (t-nT_x)") |
(10) |
Postupnosť xs(t) je potom filtrovaná použitím analógového filtra s impulznou charakteristikou hc(t) a výstupný spojitý signál yc(t) sa získa pomocou konvolúcie
![y_s (t) = \sum_{n=- \infty}^{\infty} x[n] h_c (t-nT_x)](http://s0.wp.com/latex.php?latex=y_s+%28t%29+%3D+%5Csum_%7Bn%3D-+%5Cinfty%7D%5E%7B%5Cinfty%7D+x%5Bn%5D+h_c+%28t-nT_x%29&bg=ffffff&fg=000000&s=0 "y_s (t) = \sum_{n=- \infty}^{\infty} x[n] h_c (t-nT_x)") |
(11) |
Nakoniec, interpolant y[ℓ] je získaný vzorkovaním yc(t) v časových okamžikoch tℓ. V praxi, sa použije len niekoľko vzoriek vstupného signálu na interpoláciu a hc(t) je impulzná charakteristika fiktívneho analógového filtra s lineárnou fázou, ktorá je nulová mimo intervalu -NTx/2 ≤ t ≤ (NTx/2) -Tx. Z tohto dôvodu je hodnota y[ℓ] určená nasledovne
![y[\iota ] = y_c (t_{\iota}) = \sum_{k=-N/2}^{(N/2)-1} x[n_{\iota } -k] h_c ((k+ \mu_{\iota} )T_x)](http://s0.wp.com/latex.php?latex=y%5B%5Ciota+%5D+%3D+y_c+%28t_%7B%5Ciota%7D%29+%3D+%5Csum_%7Bk%3D-N%2F2%7D%5E%7B%28N%2F2%29-1%7D+x%5Bn_%7B%5Ciota+%7D+-k%5D+h_c+%28%28k%2B+%5Cmu_%7B%5Ciota%7D+%29T_x%29&bg=ffffff&fg=000000&s=0 "y[\iota ] = y_c (t_{\iota}) = \sum_{k=-N/2}^{(N/2)-1} x[n_{\iota } -k] h_c ((k+ \mu_{\iota} )T_x)") |
(12) |
Predpokladá sa, že základný index nℓ vstupnej vzorky odpovedá centrálnej vzorke z intervalu -NTx/2 ≤ t ≤ (NTx/2) -Tx, kde interval dĺžky N je párne celé číslo. Interpolačný systém podľa Obr.4 môže byť implementovaný číslicovo napodobniac impulznú charakteristiku fiktívneho analógového filtra hc(t) pomocou po častiach polynomiálnych funkcií premennej t. Presne povedané hc(t) je tvorená z polynómov premennej t v každom intervale:{kTx,(k+1)Tx} pre k = -N/2, -(N/2)+1, … ,(N/2)-1. Pre dosiahnutie polynomiálnej interpolácie vyjadríme impulznú charakteristiku hc(t) v tvare
T_x) = \sum_{m=0}^M c_m (k) \mu_{\iota }^m") |
+1, \dots , (N/2)-1") |
(13) |
kde c0(k), c1(k), … ,cM(k), sú koeficienty a M ≤ N-1 je stupeň polynómov. Interpolačné koeficienty môžeme vypočítať pomocou nasledujúceho jednoduchého vzťahu
 x^m = \prod_{j=-(N/2)-1, j \neq k}^{N/2} \frac{j-x}{-k+j}") |
|
(14) |
V tab.1 sú tieto koeficienty uvedené pre kubické Lagrangeove polynómy a v tab.2 pre Lagrangeove polynómy 5. rádu. Použijeme ich neskôr aj pri prevzorkovaní diskrétneho signálu pomocou Farrowovho filtra. Ak sa spojitá premenná μℓ mení od 0 po 1, tak rov.(12) nadobdne tvar
 = \sum_{m=0}^M c_m (k) \left ( \frac{t-kT_x}{T_x} \right )^m") |
|
(15) |
Polynomiálny interpolačný filter hc(t) jeurčený výberom stupňa polynómov a hodnotami koeficientov c0(k), c1(k), … ,cM(k). V mnohých aplikáciách je možné dosiahnuť uspokojivé výsledky pomocou Lagrangeových polynómov alebo B-splajnových funkcií.
Tab. 1 Lagrangeove koeficienty pre kubickú interpoláciu.
| k | m=0 | m=1 | m=2 | m=3 |
| 1 | 0 | -1/6 | 0 | 1/6 |
| 0 | 0 | 1 | 1/2 | -1/2 |
| -1 | 1 | -1/2 | -1 | 1/2 |
| -2 | 0 | -1/3 | 1/2 | -1/6 |
Tab. 2 Lagrangeove koeficienty pre interpoláciu 5. rádu.
| k | m=0 | m=1 | m=2 | m=3 | m=4 | m=5 |
| -2 | 0 | 0.05 | -4.1667e-02 | -4.1667e-02 | 4.1667e-02 | -8.3333e-02 |
| -1 | 0 | -0.5 | 0.6667 | 8.3333e-02 | -0.203 | 4.1667e-02 |
| 0 | 1 | -0.3333 | -1.25 | 4.1667e-02 | 0.25 | -8.3333e-02 |
| 1 | 0 | 1 | 0.6667 | -0.5833 | -0.1667 | 8.3333e-02 |
| 2 | 0 | -0.25 | -4.1667e-02 | 0.2917 | 4.1667e-02 | -4.1667e-02 |
| 3 | 0 | 3.3333e-02 | 0 | -4.1667e-02 | 0 | 8.3333e-02 |
4. Implementácia polynomiálnych interpolačných filtrov používajúca Farrowovu štruktúru
Aproximácia analógového filtra s impulznou charakteristikou hc(t) na polynomiálnom základe umožňuje číslicovú implementáciu analógovo-číslicového modelu z obr.4. Dosadením hc((k+μℓ)Tx) z rov.(13) do rov.(12) dostaneme nasledovný výraz pre výpočet interpolantu y[ℓ]
![y [\iota] = x[n_{\iota } -k] \sum_{m=0}^{M} c_m(k) \mu_{\iota}^m](http://s0.wp.com/latex.php?latex=y+%5B%5Ciota%5D+%3D++x%5Bn_%7B%5Ciota+%7D+-k%5D+%5Csum_%7Bm%3D0%7D%5E%7BM%7D+c_m%28k%29+%5Cmu_%7B%5Ciota%7D%5Em+&bg=ffffff&fg=000000&s=0 "y [\iota] = x[n_{\iota } -k] \sum_{m=0}^{M} c_m(k) \mu_{\iota}^m") |
(16) |
ktorý je možné upraviť do tvaru
![y [\iota] = \sum_{m=0}^{M} \mu_{\iota}^m \left ( \sum_{k=-N/2}^{(N/2)-1} c_m(k) x[n_{\iota } -k] \right )](http://s0.wp.com/latex.php?latex=y+%5B%5Ciota%5D+%3D+%5Csum_%7Bm%3D0%7D%5E%7BM%7D+%5Cmu_%7B%5Ciota%7D%5Em+%5Cleft+%28+%5Csum_%7Bk%3D-N%2F2%7D%5E%7B%28N%2F2%29-1%7D+c_m%28k%29+x%5Bn_%7B%5Ciota+%7D+-k%5D+%5Cright+%29+++&bg=ffffff&fg=000000&s=0 "y [\iota] = \sum_{m=0}^{M} \mu_{\iota}^m \left ( \sum_{k=-N/2}^{(N/2)-1} c_m(k) x[n_{\iota } -k] \right )") |
(17) |
Pre zjednodušenie výpočtu môžeme tento výraz napísať v tvare
![y [\iota] = \sum_{m=0}^{M} v_m [n_{\iota }] \mu_{\iota }^m](http://s0.wp.com/latex.php?latex=y+%5B%5Ciota%5D+%3D+%5Csum_%7Bm%3D0%7D%5E%7BM%7D+v_m+%5Bn_%7B%5Ciota+%7D%5D+%5Cmu_%7B%5Ciota+%7D%5Em&bg=ffffff&fg=000000&s=0 "y [\iota] = \sum_{m=0}^{M} v_m [n_{\iota }] \mu_{\iota }^m") |
(18) |
kde vm[nℓ] je výsledkom konvolúcie
![v_m [n_{\iota }] = \sum_{k=-N/2}^{(N/2)-1} c_m[k] x[n_{\iota } -k]](http://s0.wp.com/latex.php?latex=v_m+%5Bn_%7B%5Ciota+%7D%5D++%3D+%5Csum_%7Bk%3D-N%2F2%7D%5E%7B%28N%2F2%29-1%7D+c_m%5Bk%5D+x%5Bn_%7B%5Ciota+%7D+-k%5D&bg=ffffff&fg=000000&s=0 "v_m [n_{\iota }] = \sum_{k=-N/2}^{(N/2)-1} c_m[k] x[n_{\iota } -k]") |
(19) |
Rovnica (19) prezentuje vstupno-výstupný vzťah filtra s konečnou impulznou odozvou (KIO), ktorého koeficienty impulznej odozvy sú cm(-(N/2), c1(-(N/2)+1), … ,cm((N/2)-1). Je zrejme, že prenosová funkcia tohto KIO filtra Cm(z) je daná vzťahom
 = \sum_{k=0}^{N-1} c_m(k) z^{-k}, \; m=0,1, \dots ,M") |
(20) |
Koeficienty cm(k) sú pre daný návrh konštanty, ktoré sú nezávislé od μℓ a sú určené iba filtrom s impulznou odozvou hc(t). Rovnica (18) je sama o sebe polynomiálna a závisí na μℓ, čo je jediný premenný parameter v štruktúre. Koeficienty môžeme vypočítať pomocou rov.(14) a sú konštantné pre daný rád filtra. Zodpovedajúca štruktúra, ktorá implementuje rov.(18) a (19) je Farrowova štruktúra pozostávajúca z M +1 KIO subfiltrov s konštantnými koeficientmi, zapojených paralelne, ktorých výstupy sú vynásobené mocninami parametra μℓ, a následne sa spolu sčítajú ako to vidno na obr.5. Na obr.6 je sú zobrazené detaily KIO subfiltra z Farrowovej štruktúry na obr.5.
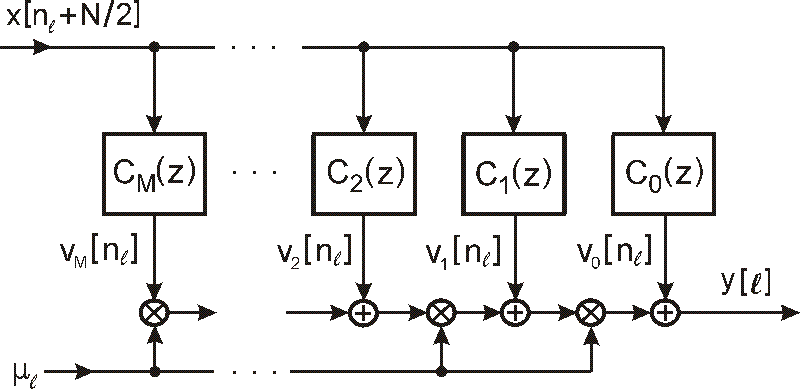
Obr.5 Bloková schéma Farrowovej štruktúry pre interpoláciu.
Možno si všimnúť, že bloková schéma na obr.5 implementuje kauzálny Farrowov filter. V tejto kapitole sme sa zamerali na problém výpočtu hodnoty vzorky jediného interpolantu, ktorý sa nachádzala medzi dvoma známymi vzorkami. Ako bolo ukázané, tak pozícia novej interpolovanej vzorky môže byť ľubovoľné zvolená v časovom intervale medzi dvomi po sebe idúcimi vzorkami. Jediným nastaviteľným parametrom je zlomkový parameter μℓ. Môžeme adaptovať zmeny μℓ, aby sme konvertovali vstupnú vzorkovaciu frekvenciu fx na požadovanú výstupnú vzorkovaciu frekvenciu fy. Vo všeobecnosti tento prístup je použiteľný, keď pomer fx/fy je racionálne, alebo iracionálne číslo a je vhodný pre zvýšenie ako aj zníženie vzorkovacej frekvencie.
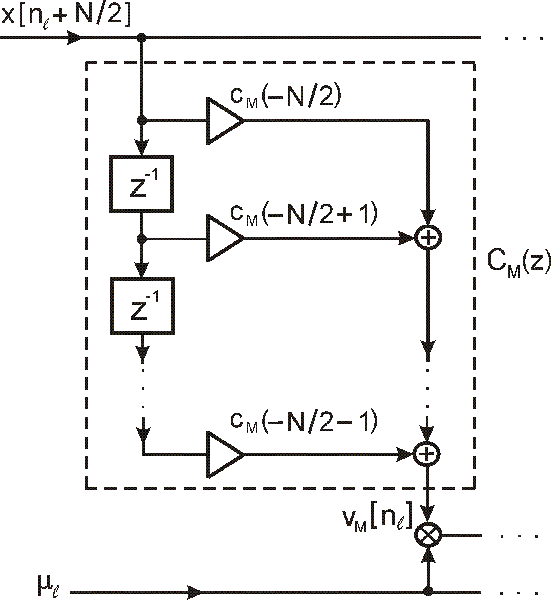
Obr. 6 Detaily KIO subfiltra s dĺžkou N.
Použitím metódy založenej na polynómoch a Farrowovej štruktúry môžeme účinne realizovať zmenu vzorkovacej frekvencie s ľubovoľným faktorom [8].
5. Experimentálne výsledky
Experimentprevzorkovania sme vykonali pre diskrétny signál získaný vzorkovaním spojitého signálu s komplexným frekvenčným spektrom
 = \pi e^{- | \omega |}") |
(21) |
ohraničeným maximálnou kruhovou frekvenciou ωm =10 [rad.s-1]. Ohraničenému spektru odpovedá v časovej oblasti spojitý signál
 = \frac{1}{1+t^2} (1-e^{- \omega_n } cos \omega_m t + te^{- \omega_n } sin \omega_m t), \; t \in <-\infty , \infty>") |
(22) |
Jeho grafické zobrazenie na časovom intervale 
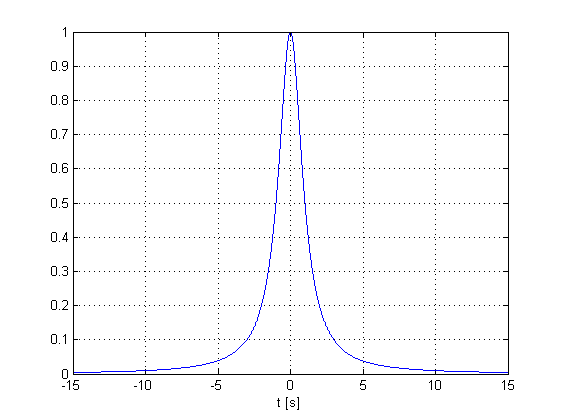
Obr.7 Spojitý signál x(t).
Kruhovú vzorkovaciu frekvenciu pre tento signál volíme ωx = 30 [rad.s-1]. Vstupný diskrény signál x(nTx) dostaneme vzorkovaním spojitého signálu x(t) daného rov.(22) so vzorkovacou periódou Tx=2π/ωx = 0.2094395102 [s], resp. vzorkovacou frekvenciou fx = 4.774648293[Hz]. Vykonali sme prevzorkovanie signálu x(nTx) interpolačnými metódami pomocou: a) kubického splajnu definovaného v Matlabe funkciou spline (x,Y,xx), b) Farrowového filtra, c) Lagrangeových polynómov 3.rádu. Koeficienty pre Farrowov filter sme zvolili pre dĺžku N=4 a 5 (3. a 5. rádu). Vypočítali sme strednú kvadratickú chybu
 - \hat{x}(nT_y))^2") |
(23) |
kde ")
Tab. 3 Vypočítané hodnoty strednej kvadratickej chyby – zvyšovanie vzorkovacej frekvencie
| fy | Ty | L | Kubický splajn | Farrowov filter N=4 | Farrowov filter N=6 | Lagrangeové polynómy |
| 5.1 | 0,19607843137254 | 154 | 6.2709e-11 | 1.1282e-03 | 1.4795e-02 | 9.6483e-06 |
| 7.9 | 0,12658227848101 | 238 | 1.5299e-10 | 1.1306e03 | 9.9121e-03 | 6.2461e-06 |
| 10.4 | 0.09615384615384 | 313 | 1.5786e-10 | 1.1320e-03 | 7.8587e-03 | 4.8165e-06 |
| 21.5 | 0.04651162790697 | 646 | 1.5789e-10 | 1.1335e-03 | 4.4295e-03 | 2.3978e-06 |
| 33.7 | 0.02967359050445 | 1012 | 1.5808e-10 | 1.1341e-03 | 1.3621e-03 | 1.0485e-06 |
| 44.5 | 0.02212389380531 | 1357 | 1.5812e-10 | 1.1345e-03 | 1.2714e-03 | 7.9448e-07 |
| 50.08 | 0.01996805111821 | 1503 | 1.5817e-10 | 1.1348e-03 | 1.2825e-03 | 7.3128e-07 |
| 60 | 0.01666666666666 | 1801 | 1.5814e-10 | 1.1346e-03 | 1.2655e-03 | 1.4169e-07 |
Tab. 4 Vypočítané hodnoty strednej kvadratickej chyby – znižovanie vzorkovacej frekvencie
| fy | Ty | L | Kubický splajn | Farrowov filter N=4 | Farrowov filter N=6 | Lagrangeové polynómy |
| 4.7 | 0.212765957446809 | 142 | 2.4095e-11 | 1.1289e-03 | 1.0895e-03 | 2.1638e-09 |
| 4.35 | 0.229885057471264 | 131 | 2.5248e-10 | 1.1338e-03 | 1.1836e-03 | 1.0676e-08 |
| 4.1 | 0.243902439024390 | 124 | 7.5161e-11 | 1.1271e-03 | 1.0556e-03 | 4.8397e-09 |
| 3.5 | 0.285714285714286 | 106 | 7.0842e-11 | 1.1254e-03 | 1.2190e-03 | 4.1498e-09 |
| 3.2 | 0.312500000000000 | 97 | 3.0871e-10 | 1.1249e-03 | 1.1027e-03 | 1.2138e-08 |
| 2.5 | 0.400000000000000 | 76 | 1.2213e-10 | 1.1229e-03 | 8.5381e-04 | 9.0194e-09 |
| 1.2 | 0.833333333333333 | 37 | 9.4382e-10 | 2.2119e-03 | 2.3935e-03 | 4.3116e-08 |
| 0.7 | 1.428571428571429 | 22 | 2.6233e-11 | 3.6427e-03 | 4.0164e-03 | 1.4169e-07 |
Pre ilustráciu je na obr.8 zobrazený pôvodný, avšak harmonický diskrétny signál so vzorkovacou frekvenciou fx = 302.7 [Hz] a prevzorkovaný signál vypočítaný pomocou príkazu spline v Matlabe pre zvýšenú vzorkovaciu frekvenciu fy = 501.3 [Hz]. Pre tento prípad je stredná kvadratická chyba ε =3.0980.10-9 a počet vzoriek po prevzorkovaní L=301.
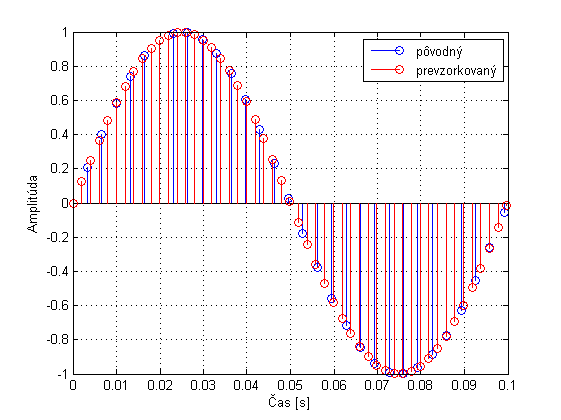
Obr.8 Pôvodný a prevzorkovaný signál zobrazený na intervale 
6. Záver
V tomto článku sme navrhli spôsob zmeny vzorkovacej frekvencie diskrétneho signálu s ľubovoľným faktorom pomocou techniky známej ako interpolácia. Vypracovali sme programové prostriedky pre prevzorkovanie s využitím Lagrangeových polynómov, Farrowovej štruktúry a kubického splajnu v prostredí Matlab. Vypočítané hodnoty strednej kvadratickej chyby pre zvyšovanie a znižovanie vzorkovacej frekvencie sú uvedené v tabuľkách. Z uvedených výsledkov je vidieť, že najlepšie výsledky z hľadiska strednej kvadratickej chyby dáva interpolácia s kubickým splajnom, za ňou ďalej nasleduje interpolácia s Lagrangeovými polynómami a nakoniec metóda používajúca Farrowovu štruktúru, avšak je potrebné vziať do úvahy, že táto používa subfiltre veľmi nízkeho rádu.
Literatúra
- Crochiere, R. E., Rabiner, L. R.: Multirate Digital Signal Processing, Englewood Cliffs, NJ: Prentic- Hall, 1983, ISBN 0-13-605162-6.
- Jonvanović-Doleček, G.: Multirate Systems: Design & Applications. London , U. K. :Idea Group Publshing, 2002, ISBN 1-59140-019-8.
- Malvar, H. S.: A Link between Transform Coding and Multirate Filter Banks. IEEE Int. Symp. Circuit and Systems, 1988, pp. 835-838.
- Campbel, W. M., Parks, T.W.: Design of a Class of Multirate Systems. In: ICASSP Proceedings, 1995, pp. 1308-1311.
- Harris, F.J .: Multirate Signal Processing for Communications. Upper Saddle River, NJ: Prentice – Hall, 2004
- Fliege, N. J.: Multirate Digital Signal Processing: Multirate Systems, Filter Banks, Wavelets. John Willy & Sons, Chichester, 1994 ISBN 0-471-93976-5.
- Zavacký, J., Mihalík, J.: Diskrétne spracovanie signálov, LČSOV FEI TU Košice, 2011, ISBN 978-80-553-0730-5, (319 strán).
- Milić, J.: Multirate Filtering for Digital Signal Processing: Matlab Applications, Hershey, New York, 2009, ISBN 978-1-60566-178-0.
Spoluautorom článku je Ing. Jozef Zavacký, PhD., Katedra elektroniky a multimediálnych telekomunikácií, Fakulta elektrotechniky a informatiky, Technická univerzita v Košiciach, Slovenská republika

