EMC jednosmerného diskového elektromotora
23. Máj, 2016, Autor článku: Birnstein Tomáš, Elektrotechnika
Ročník 9, číslo 5  Pridať príspevok
Pridať príspevok
![]() Článok sa zaoberá počítačovou analýzou elektromagnetickej kompatibility (EMC) elektrických strojov, ktorá umožňuje odhaliť významné, doteraz neopísané, fakty. Taktiež je analyzovaný problém vyžarovania elektromagnetického poľa elektrického motora do okolitého priestoru, ktorý je týmto poľom ovplyvňovaný.
Článok sa zaoberá počítačovou analýzou elektromagnetickej kompatibility (EMC) elektrických strojov, ktorá umožňuje odhaliť významné, doteraz neopísané, fakty. Taktiež je analyzovaný problém vyžarovania elektromagnetického poľa elektrického motora do okolitého priestoru, ktorý je týmto poľom ovplyvňovaný.
1. Úvod
Dôležitosť otázky elektromagnetickej kompatibility (EMC) všetkých elektrických výrobkov výrazne vzrástla počas posledných rokov. Kvalita života a prevádzky, a to nielen biologických [1], ale aj technických objektov, sa zhoršuje zvyšovaním znečistenia prostredia vyžarovanou elektromagnetickou energiou. Veľkosť ovplyvňovania okolitého prostredia elektrospotrebičmi sa zdvojnásobuje približne každé tri roky a pokrýva široké frekvenčné spektrum. Možnosť poruchy zariadení a ich funkčnosti sa stáva stále vážnejším problémom, taktiež aj v dôsledku zvyšovania hustoty integrácie elektronických obvodov. Na základe novej technickej legislatívy, a taktiež v dôsledku ekonomických dopadov, musí byť EMC výrobkov dôsledne preskúmavané [2], [3]. Malo by začať špecifikáciou vlastností pri konštrukcií zariadení a končiť prevádzkovými odporúčaniami pre dané zariadenie.
2. Elektrické motory
Vo väčšine prípadov výkonových elektrotechnických systémov je záťaž predstavovaná rezistorom, cievkou alebo motorom. Najčastejším využitím elektrickej energie v priemysle je jej premena na mechanickú prácu. Preto sa v ďalšom sústredíme len na motorický typ záťaže. Motory môžeme podľa charakteru napájacieho napätia rozdeliť na striedavé a jednosmerné. Z hľadiska EMC by sa mohlo zdať, že jednosmerné motory, vďaka ich jednosmernému prúdu a statickému magnetickému poľu s danou orientáciou, majú oveľa lepšie EMC ako motory striedavé. Na príklade jednosmerného diskového motora s permanentnými magnetmi si však ukážeme, že nezohľadnenie poznatkov o EMC môže viesť k nepriaznivým výsledným parametrom ich EMC.
3. Jednosmerný diskový motor s permanentnými magnetmi
Pri vyšetrovaní EMC jednosmerného diskového motora s permanentnými magnetmi vychádzame z nominálnych hodnôt konkrétneho motora, ktorými v našom prípade sú:
- nominálny výkon: PN = 300 W
- nominálne otáčky: nN = 3000 ot./min.
- nominálne napätie: UN = 70 V
Keďže pre analýzu majú rozhodujúci význam najmä parametre magnetického obvodu, tak sa v ďalšom sústredíme len na ne. Budenie motora je realizované budiacimi pólmi vyrobenými z permanentných magnetov generujúcich požadovaný magnetický tok. Ako materiál pre ich výrobu bol zvolený SmCo 27 MGOe, ktorého koerecitívna sila má veľkosť Hc = 772000 A.m-1 a relatívna permeabilita má hodnotu μrm = 2,382. Jarmá a pólové nadstavce motora sú vyrobené z ocele 1117 s magnetizačnou charakteristikou uvedenou v tabuľke Tab. 1 a na obrázku Obr. 1 [4].
Tab. 1
| B [T] | H [A.m-1] | μ [H.m-1] |
|---|---|---|
| 0,2 | 53,2143 | 0,003758388 |
| 0,7004 | 238,7325 | 0,002933828 |
| 1,351 | 795,775 | 0,001697716 |
| 1,624 | 3183,1 | 0,000510194 |
| 1,77 | 7957,75 | 0,000222425 |
| 2 | 31831 | 6,28318E-05 |
| 2,13 | 79577,5 | 2,67664E-05 |
| 2,25 | 159155 | 1,41372E-05 |
| 2,46 | 318310 | 7,72832E-06 |
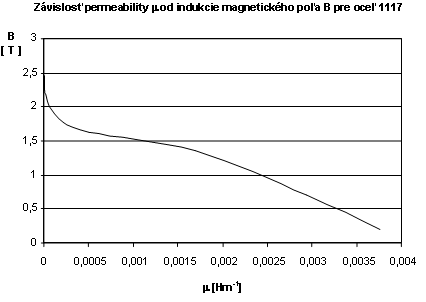
Obr. 1 Závislosť permeability μ od veľkosti magnetickej indukcie B pre oceľ 1117
Analýzu EMC motora vykonáme na základe náhradnej schémy magnetického obvodu 10-pólového jednosmerného diskového motora s permanentnými magnetmi, ktorá je uvedená na obrázku Obr. 2. Pre uvedenú náhradnú schému platí rovnica:
 \phi") |
(1) |
kde – Um je magnetické napätie generované budiacimi magnetmi, Rmag je magnetický odpor budiaceho magnetu, Rmp je magnetický odpor oceľovej časti pólového nadstavca, Rmv je magnetický odpor vzduchovej medzery, Rmz je magnetický odpor jarma (bočných krytov), ale len vo vzdialenosti medzi jednotlivými pólmi motora.
Stanovenie jednotlivých magnetických odporov častí motora je možné vykonať na základe dobre známeho vzťahu [5], kde dĺžka l predstavuje dĺžku strednej magnetickej siločiary príslušnej časti magnetického obvodu a plocha S predstavuje plochu jeho prierezu, cez ktorú prechádzajú magnetické siločiary:
 |
(2) |
Celkový prehľad jednotlivých parametrov magnetického obvodu motora, získaných výpočtom podľa vzťahov platných pre návrh elektrických strojov [6], [7] , je uvedený v tabuľke Tab. 2.
Tab.2
| Časti magnetického obvodu motora | ||||
|---|---|---|---|---|
| Permanentný magnet (pozícia B) | Pólový nadstavec (pozícia C) | Jarmo statora motora (pozícia A) | Vzduchová medzera (pozícia D) | |
| S [m2] | 0,000352989 | 0,0007443424 | 0,000494 | 0,0007443424 |
| l [m] | 0,0124 | 0,0026 | 0,03864 | 0,0039 |
| μ [H.m-1] | 2,993.10-6 | 2,52.10-3 | 1,55.10-3 | 1,2566.10-6 |
| B [T] | 1,96 | 0,9296 | 1,4 | 0,9296 |
| Rm [H-1] | 11739327,17 | 1385,947 | 50434,46 | 4168966,476 |
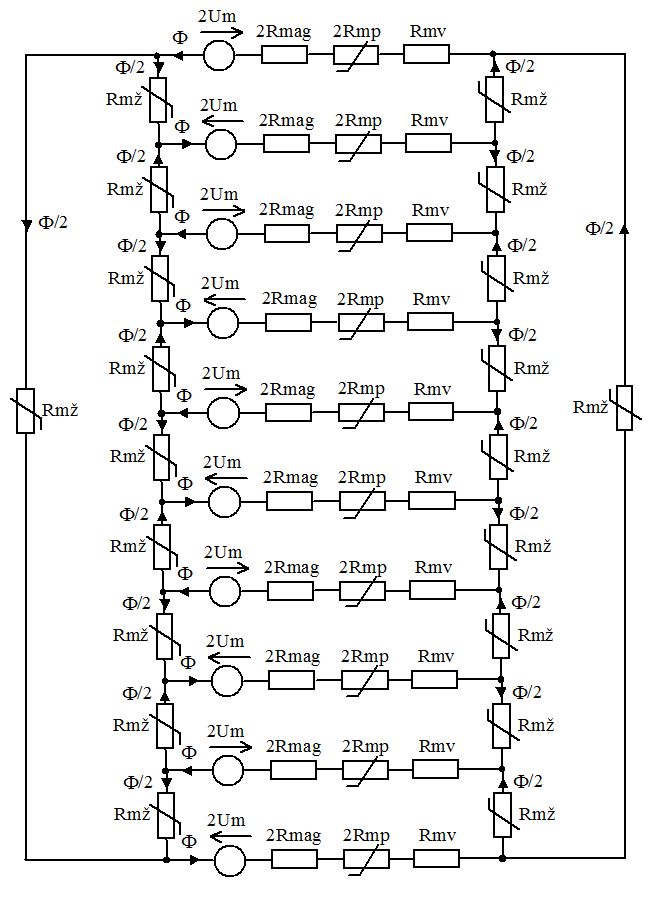
Obr. 2 Náhradná schéma magnetického obvodu 10-pólového diskového motora
Na obrázku Obr. 3 je zobrazené rozmiestnenie pólov motora na pravej časti statora, pričom je vidieť aj umiestnenie dvoch párov napájacích kief motora. Na obrázku Obr. 4 je zobrazený motor v rozloženom stave.
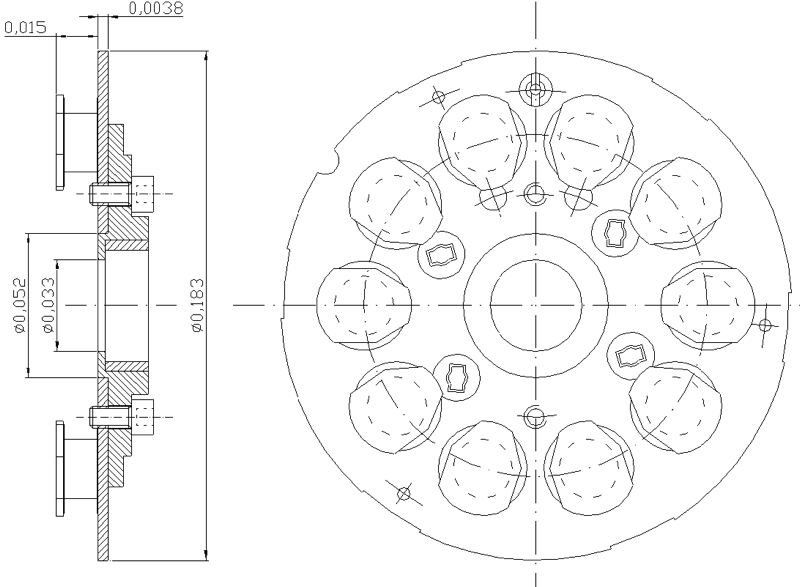
Obr. 3. Rez motorom a vnútorný pohľad na pravú stranu statora.
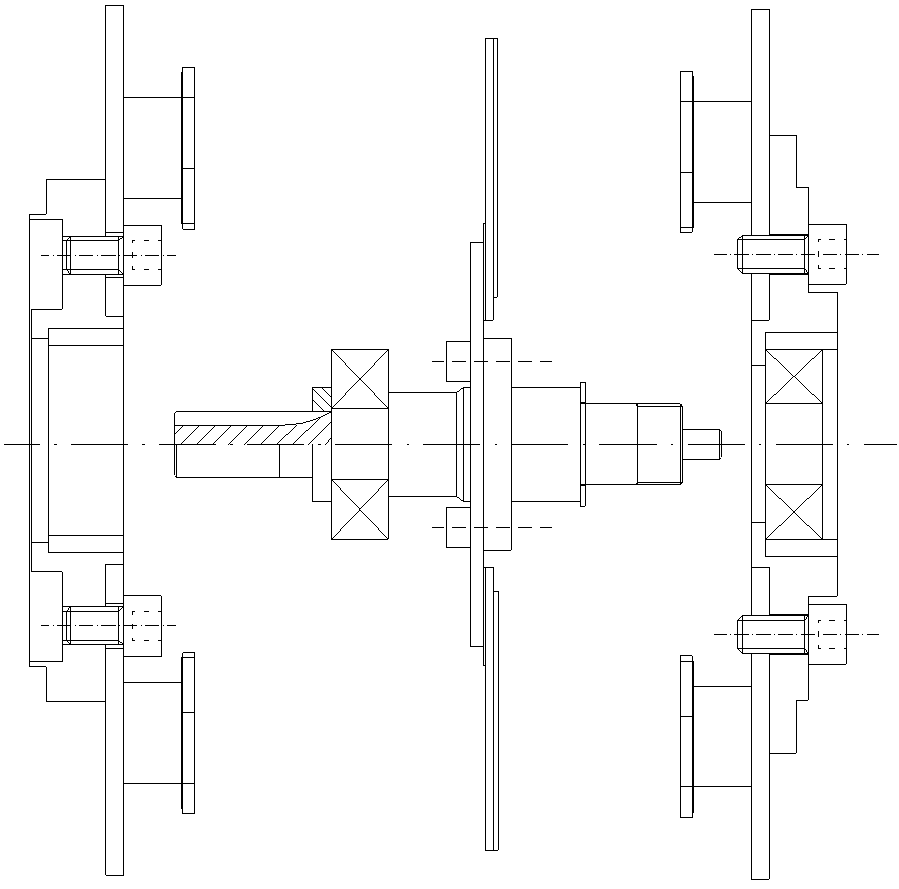
Obr. 4. Motor v rozloženom stave.
Na obrázku Obr. 5 je zobrazený výkres zostaveného diskového motora s permanentnými magnetmi a na obrázkoch Obr. 6 až Obr. 8 sú ukážky praktickej realizácie jednotlivých častí motora.

Obr. 5. Výkres zostaveného diskového jednosmerného motora s permanentnými magnetmi.
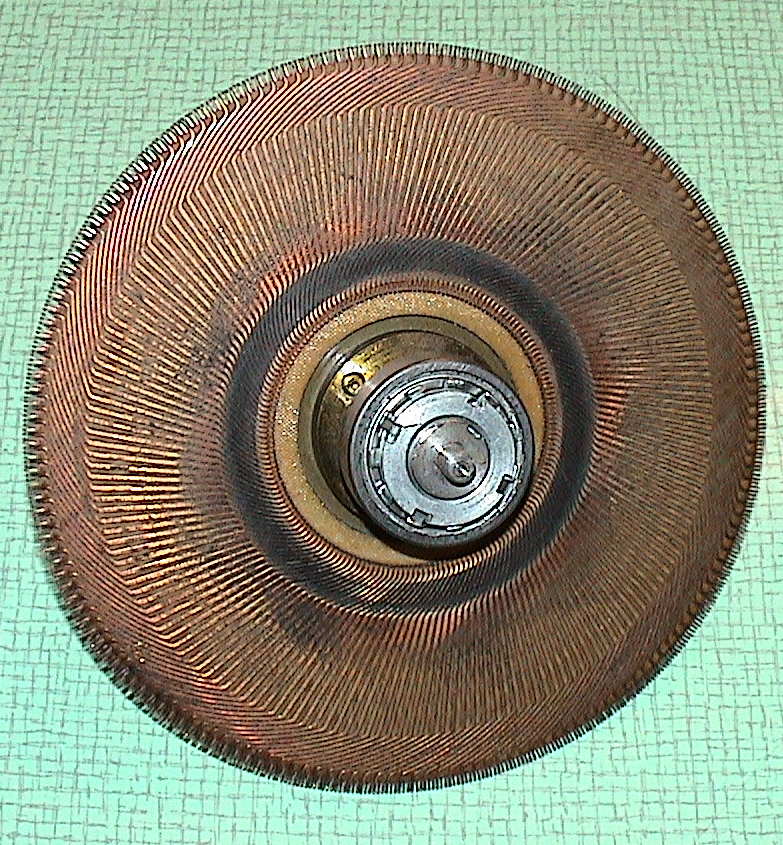
Obr. 6. Rotor.
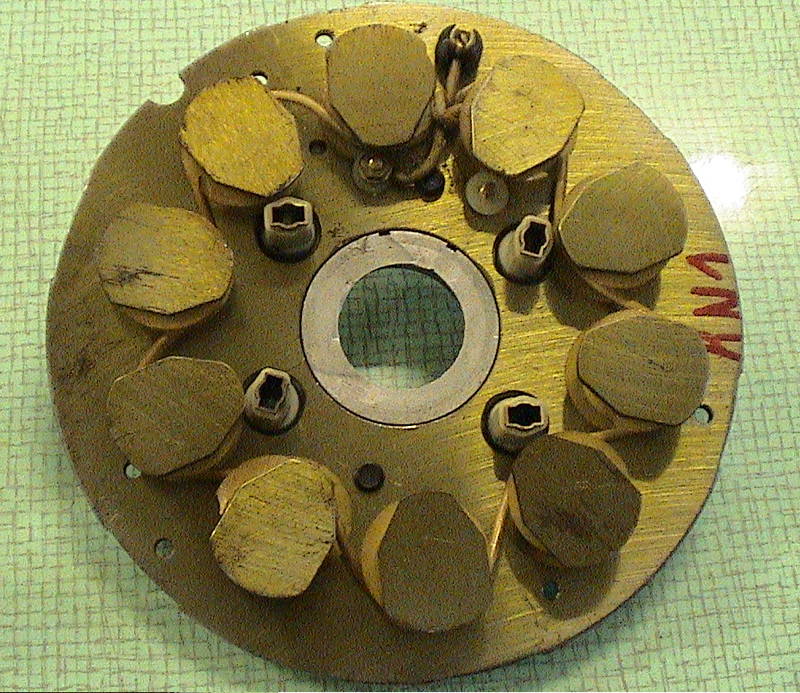
Obr. 7. Pravá strana statora
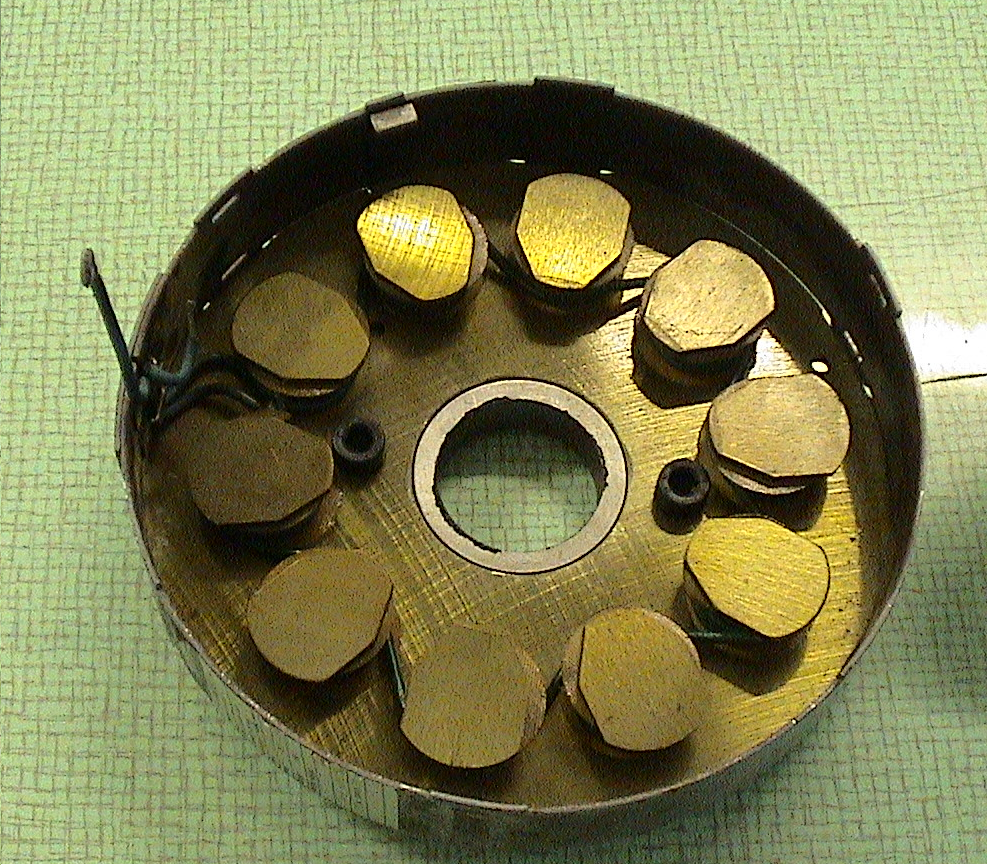
Obr. 8. Ľavá strana statora.
3.1 Numerická počítačová simulácia magnetického poľa motora
Správnosť návrhu konštrukčného riešenia jednosmerného diskového motora s permanentnými magnetmi verifikujme pomocou počítačových numerických metód riešenia jeho magnetického poľa. Na obrázku Obr. 9 je výsledok takejto počítačovej analýzy, pričom bola použitá metóda konečných prvkov [8], [9]. Zdôrazňujeme, že z dôvodu jednoduchšej dvojrozmernej simulácie uvažujme, že zaoblený desaťpólový stator motora je rozvinutý do roviny.
Porovnaním hodnôt magnetického poľa v jednotlivých miestach A, B, C, D magnetického obvodu motora, získaných klasickým a numerickým riešením, dostaneme relatívnu chybu δ simulačného návrhu. Za vzťažné budeme pri tom považovať klasické riešenie. Výsledná chyba je taktiež pravdepodobnou možnou chybou celkového návrhu. Relatívna chyba bodu A je δA = 100.(1,402–1,4)/1,4 = 0,142%, bodu B je δB = 100.(1,954-1,96)/ /1,96 = –0,306%, bodu C je δC = 100.(1,107–0,9296)/0,9296 = 19,08% a bodu D je δD = 100.(0,9991–0,9296)/0,9296 = 7,47%. Vidíme, že najväčšia nepresnosť môže vzniknúť pri návrhu pólových nadstavcov, kde je relatívna chyba obidvoch metód najväčšia. Tento rozdiel je spôsobený aj tým, že práve v pólových nadstavcoch dochádza, pri jeho malých rozmeroch, k vzniku veľkého gradientu magnetického poľa, ktoré sa okrem hlavného magnetického obvodu uzatvára aj rozptylovými cestami.
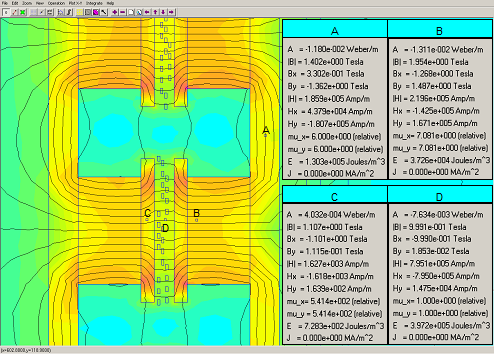
Obr. 9. Rozloženie magnetického poľa v navrhnutom motore získané numerickou simuláciou.
3.2 EMC jednosmerného diskového motora s permanentnými magnetmi
Z výsledkov získaných pomocou numerickej počítačovej simulácie, a zobrazených na obrázku Obr. 9, jasne a názorne vidieť, že magnetické pole motora sa neuzatvára len v jeho vnútri, ale zasahuje aj do jeho bezprostredného okolia. Je evidentné, že v prípade vyšetrovania EMC výkonových elektrotechnických systémov sa musí venovať pozornosť i záťaži, v našom prípade tvorenej diskovým motorom s permanentnými magnetmi. Výsledky získané analýzou budú platné nie len pre diskové motory s permanentným magnetom, ale aj pre ostatné jednosmerné a striedavé elektrické stroje. Toto konštatovanie platí v dôsledku skutočnosti, že magnetické polia týchto strojov majú menej statický charakter.
3.2.1 Simulácia a meranie EMC motora
Vyšetrime teraz EMC navrhnutého motora. Použime numerickú počítačovú simuláciu magnetického poľa. Zvoľme dve pozície (A, B) v jeho okolí, obrázok Obr.13 a Obr.14. Bod A predstavuje pozíciu, kadiaľ sa uzatvára vonkajšie rozptylové pole medzi ľavým a pravým pólom motora, ktoré je v danom mieste pomerne homogénne. Pozícia bodu B je zvolená tak, že sa nachádza na okraji jedného z pólov motora, tvorených permanentnými magnetmi. Rozloženie magnetického poľa motora je po jeho obvode periodické. Periodicita zodpovedá počtu pólových dvojíc motora. Z hľadiska skúmania EMC nás bude okrem absolútnej veľkosti magnetického poľa zaujímať najmä jeho časová zmena vyvolaná zmenou pracovných podmienok motora. Táto zmena spôsobí v slučkách okolitých elektrických obvodov vznik nežiaduceho indukovaného napätia.
Zmena pracovných podmienok motora nastáva, okrem okamihov jeho regulácie, aj v prípade ustálenej prevádzky, ak sa jedná o napájanie z výkonového polovodičového meniča, čo je v moderných pohonoch veľmi častý prípad. Otáčky jednosmerného motora sú potom úmerné strednej hodnote napájacieho napätia motora, ktorá je zároveň aj strednou hodnotou výstupného napätia meniča. Z teórie jednosmerných elektrických strojov vieme, že moment motora je priamo úmerný jeho prúdu. Náhradná elektrická schéma jednosmerného motora je tvorená ohmicko – induktívnou záťažou s protinapätím. Priebeh prúdu motora napájaného z impulzového napäťového meniča nebude konštantný. Motor vykazuje, aj pri ustálenom chode, periodické dynamické kolísanie momentu, súvisiace so zvlnením jeho prúdu. Reálne namerané priebehy napätia uCE spínacieho tranzistora IGBT, zapojeného v jednosmernom napäťovom jednokvadrantovom impulzovom výkonovom polovodičovom meniči, a prúdu záťaže iZ, tvorenej navrhnutým diskovým motorom, sú na obrázku Obr. 10 [10].

Obr. 10. Namerané priebehy napätia uCE spínacieho tranzistora IGBT a prúdu motora iZ.
Na obrázku Obr. 11 je pre úplnosť uvedený aj priebeh napätia uCE a prúdu iC spínacieho tranzistora IGBT.
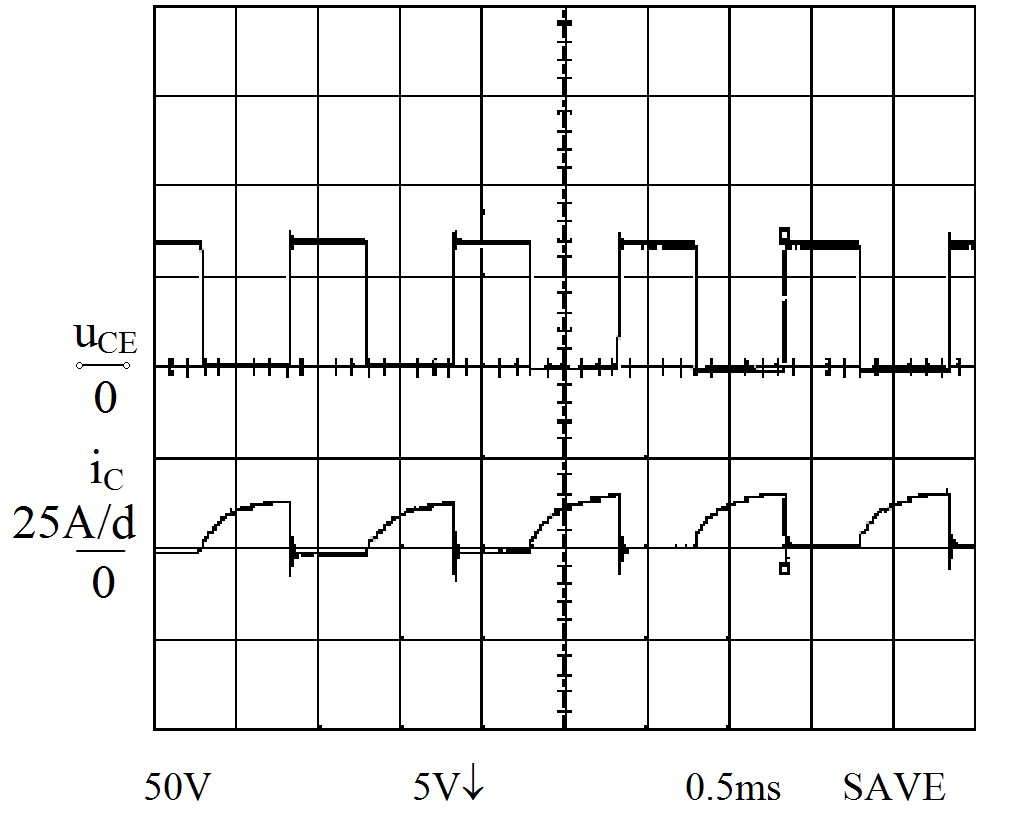
Obr. 11. Namerané priebehy napätia uCE a prúdu iC spínacieho tranzistora IGBT.
Z nameraného priebehu prúdu motora iZ je možné urobiť aproximáciu jeho hodnôt v daných časových okamihoch programom Excel. Takto získaný priebeh je uvedený na obrázku Obr. 12.
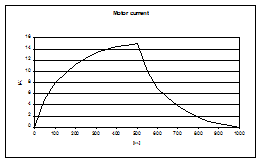
Obr. 12. Aproximovaný priebeh prúdu motora iZ získaný pomocou programu Excel.
Vyjadrenie veľkosti prúdu iZ vo zvolených časových okamihoch je uvedené v tabuľke Tab. 3.
Tab.3
| iZ [A] | t [μs] |
|---|---|
| 0 | 0 |
| 5 | 50 |
| 8 | 100 |
| 9,7 | 150 |
| 11,2 | 200 |
| 12,4 | 250 |
| 13,3 | 300 |
| 14 | 350 |
| 14,4 | 400 |
| 14,7 | 450 |
| 15 | 500 |
| 10 | 550 |
| 7 | 600 |
| 5,3 | 650 |
| 3,8 | 700 |
| 2,6 | 750 |
| 1,7 | 800 |
| 1 | 850 |
| 0,6 | 900 |
| 0,3 | 950 |
Pre dve krajné hodnoty získaného prúdu záťaže iZ, teda pre I = 0A a I = 15A vykonajme numerickú analýzu magnetického poľa. Rozdiel získaných hodnôt magnetickej indukcie násobený veľkosťou plochy S = 0,1 x 0,05 m2 iného ovplyvňovaného elektrického obvodu a podelený rozdielom času jednotlivých časových okamihov, v ktorých boli prúdy odčítané, nám umožní získať predstavu o veľkosti rušivého indukovaného napätia.
 |
(3) |
Výsledné hodnoty magnetického poľa, vo zvolených dvoch bodoch, pre veľkosť prúdu iZ na začiatku spínacej periódy, teda I = 0A, sú uvedené na obrázku Obr.13. Výsledky pre rovnaké geometrické a materiálové podmienky, ale pre okamih maximálnej veľkosti prúdu záťaže iZ, uprostred spínacej periódy, keď I = 15A, sú uvedené na obrázku Obr.14.
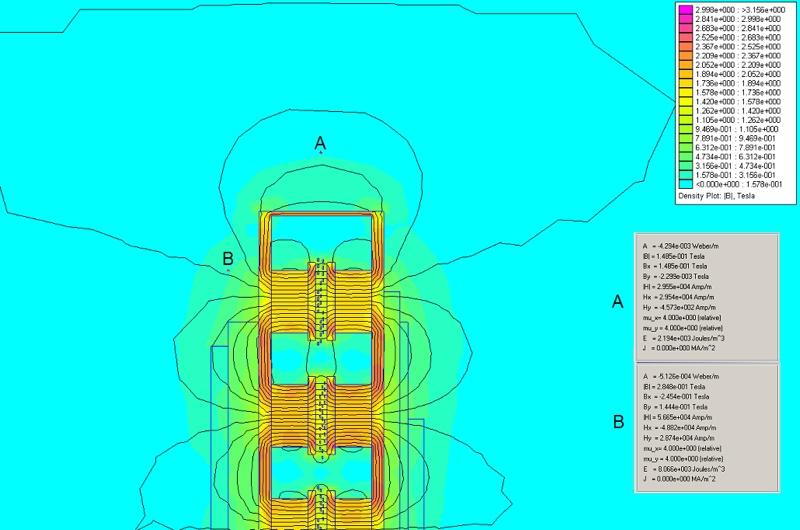
Obr. 13. Veľkosť magnetického poľa v okolí motora pri prúde motora I = 0A.
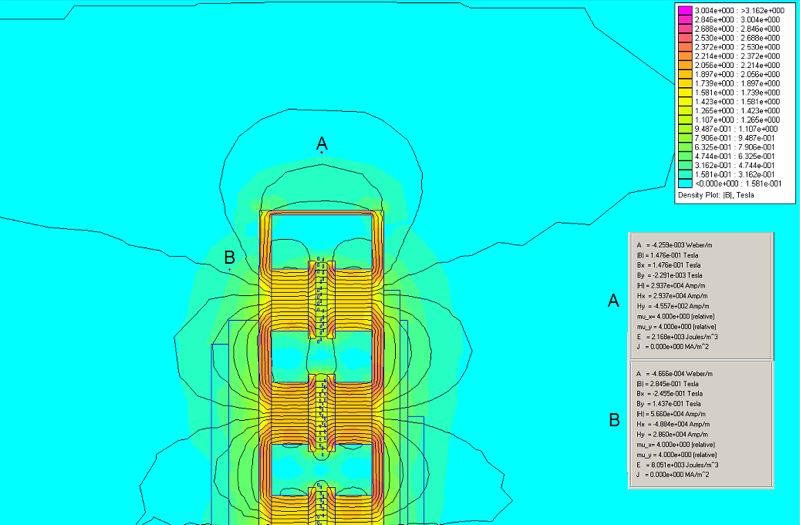
Obr. 14. Veľkosť magnetického poľa v okolí motora pri prúde motora I = 15A.
Vyššie uvedeným postupom a simuláciou boli získané hodnoty veľkostí indukcií magnetického poľa B a indukovaných napätí ui pre všetky hodnoty prúdov iZ uvedené v tabuľke Tab.3. Výsledky sú uvedené v tabuľke Tab.4.
| t [μs] | iZ [A] | BA [T] | BB [T] | uiA [V] | uiB [V] |
|---|---|---|---|---|---|
| 0 | 0 | 1,485E-01 | 2,848E-01 | 0 | 0 |
| 50 | 5 | 1,482E-01 | 2,847E-01 | -0,03 | -0,01 |
| 100 | 8 | 1,480E-01 | 2,846E-01 | -0,02 | -0,01 |
| 150 | 9,7 | 1,479E-01 | 2,846E-01 | -0,01 | 0 |
| 200 | 11,2 | 1,478E-01 | 2,846E-01 | -0,01 | 0 |
| 250 | 12,4 | 1,478E-01 | 2,845E-01 | 0 | -0,01 |
| 300 | 13,3 | 1,477E-01 | 2,845E-01 | -0,01 | 0 |
| 350 | 14 | 1,477E-01 | 2,845E-01 | 0 | 0 |
| 400 | 14,4 | 1,477E-01 | 2,845E-01 | 0 | 0 |
| 450 | 14,7 | 1,476E-01 | 2,845E-01 | -0,01 | 0 |
| 500 | 15 | 1,476E-01 | 2,845E-01 | 0 | 0 |
| 550 | 10 | 1,479E-01 | 2,846E-01 | 0,03 | 0,01 |
| 600 | 7 | 1,481E-01 | 2,846E-01 | 0,02 | 0 |
| 650 | 5,3 | 1,482E-01 | 2,847E-01 | 0,01 | 0,01 |
| 700 | 3,8 | 1,483E-01 | 2,847E-01 | 0,01 | 0 |
| 750 | 2,6 | 1,484E-01 | 2,847E-01 | 0,01 | 0 |
| 800 | 1,7 | 1,484E-01 | 2,847E-01 | 0 | 0 |
| 850 | 1 | 1,485E-01 | 2,847E-01 | 0,01 | 0 |
| 900 | 0,6 | 1,485E-01 | 2,848E-01 | 0 | 0,01 |
| 950 | 0,3 | 1,485E-01 | 2,848E-01 | 0 | 0 |
| 1000 | 0 | 1,485E-01 | 2,848E-01 | 0 | 0 |
Grafická interpretácia časovej závislosti magnetickej indukcie B je na obrázkoch Obr.15 a Obr.16 a indukovaného napätia ui na obrázkoch Obr.17 a Obr.18.
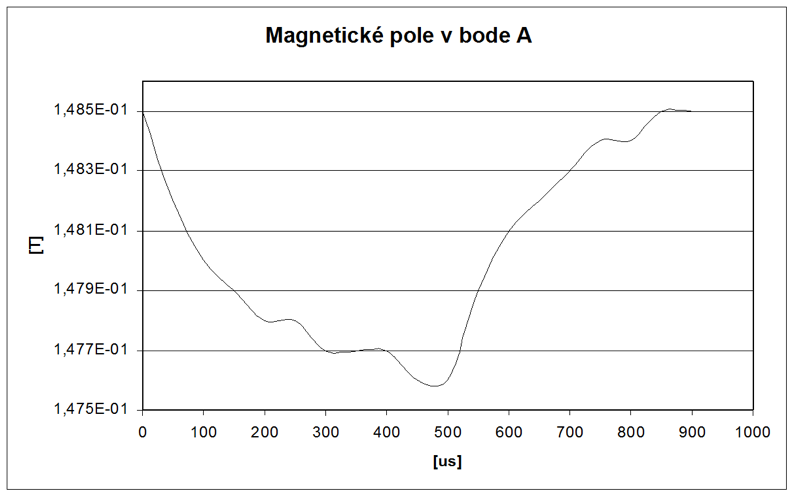
Obr. 15. Magnetická indukcia B v bode A
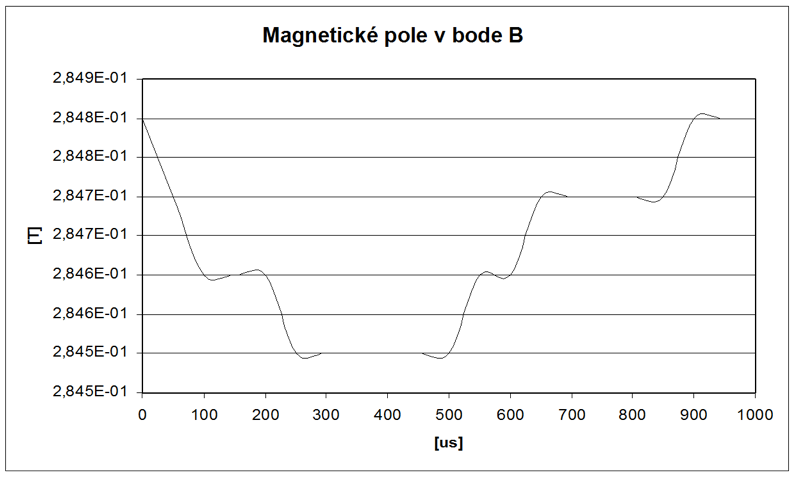
Obr. 16. Magnetická indukcia B v bode B.
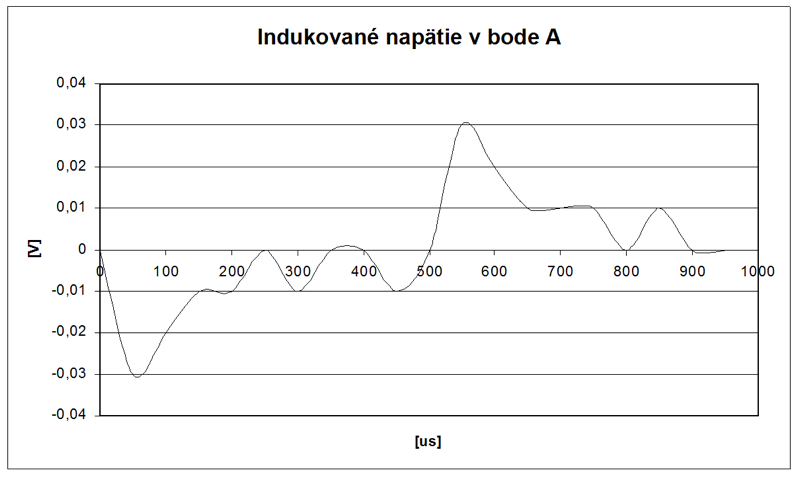
Obr. 17. Indukované napätie ui v bode A
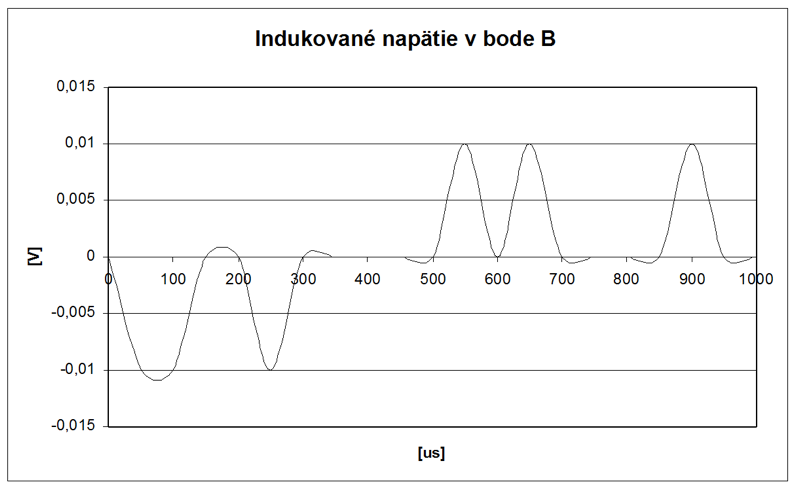
Obr. 18. Indukované napätie ui v bode B
Z predošlého usudzujeme, že najväčšia veľkosť indukovaného napätia je v mieste A, a to v čase najväčšej strmosti nárastu alebo poklesu prúdu motora, teda v okamihoch začiatkov napäťových napájacích impulzov z výkonového polovodičového meniča a v okamihoch ich skončenia. Špičky indukovaného napätia vtedy dosahujú hodnoty až 30mV. Musíme si však uvedomiť, že dané indukované napätie vzniká pri frekvencii 1 kHz. Ak by sme pracovnú frekvenciu napájacieho meniča zvýšili, tak by sa tým skrátil aj čas nárastu a poklesu prúdu, a tým by sa zvýšila veľkosť indukovaného napätia, čím by sa zhoršilo EMC motora. Uvedená frekvenčná závislosť veľkosti indukovaného napätia však nie je lineárna.
Overenie správnosti výsledkov získaných pomocou simulácie bolo vykonané pomocou praktického telemetrického automatizovaného merania [11-17] veľkosti magnetickej indukcie B vo zvolenom mieste A, kde je veľkosť magnetického poľa získaného simuláciou najnepriaznivejšia. Zapojenie meracieho pracoviska bolo realizované podľa obrázka Obr.19.
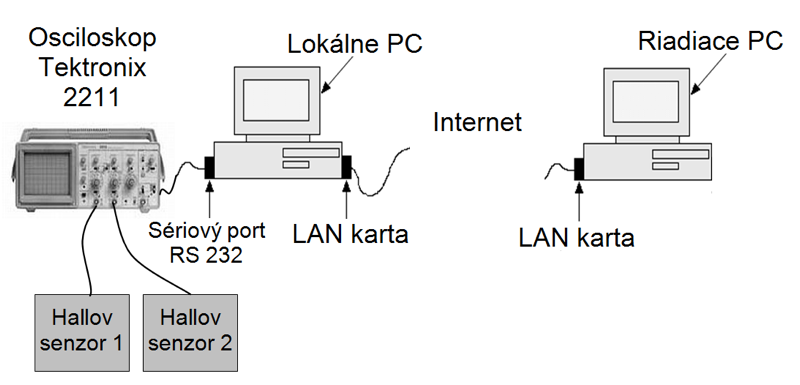
Obr. 19. Automatizovaný merací systém riadený cez Internet počítačom.
Ako snímače veľkosti magnetickej indukcie sa použili lineárne Hallove snímače typu A3516 s citlivosťou 2,5 mV/G uvedené na obrázku Obr.20.
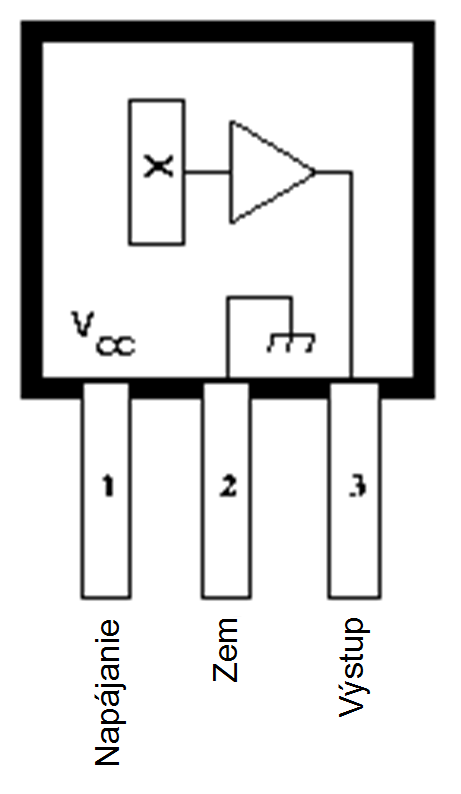
Obr. 20. Lineárny Hallov snímač magnetického poľa, typ A3516.
Nameraný priebeh napätia snímača, ktoré zodpovedá veľkosti magnetickej indukcie B v mieste A, je zobrazený na obrázku Obr.21 spolu s priebehom prúdu iC výkonového tranzistora IGBT, zapojeného v jednosmernom impulzovom meniči. Z priebehu napätia korešpondujúceho magnetickej indukcii B bola, prepnutím daného kanálu osciloskopu do režimu merania iba striedavej zložky, odfiltrovaná jednosmerná zložka odpovedajúca veľkosti 3,7V.

Obr. 21. Namerané priebehy magnetickej indukcie B a prúdu tranzistora iC.
Na obrázku Obr.22 sú uvedené priebehy indukovaného napätia ui v snímacej slučke obdĺžnikového tvaru s plochou S (S = 0,1 x 0,05 m2), tvorenej vodičom a referenčný priebeh prúdu iC tranzistora IGBT.

Obr. 22. Namerané priebehy indukovaného napätia ui a prúdu tranzistora iC.
4. Záver
Nameraný priebeh indukovaného napätia uvedený na obrázku Obr.22 vykazuje veľmi dobrú zhodu s výsledkami získanými pomocou simulačného modelu. Potvrdzuje sa tým možnosť využitia takejto simulačnej metodiky pre vyšetrovanie EMC motorov napájaných z impulzových meničov. Taktiež je zreteľne vidieť, že aj pri profesionálnej konštrukcii motora a jeho ustálených pracovných podmienkach, dochádza v jeho okolí ku generovaniu neželaného premenlivého magnetického poľa, ktoré svojimi účinkami môže narušiť činnosť blízkych elektronických obvodov. V nami vyšetrovanom prípade to bolo síce len 30mV v slučke obvodu s plochou 0,005m2, ale zvýšením pracovnej frekvencie meniča alebo zvýšením plochy slučky ovplyvňovaného obvodu dôjde aj k zvýšeniu tohto rušivého napätia.
Literatúra
- ORENDÁČ, M., LABUN, J., ORENDÁČOVÁ, J., MOJŽIŠ, M., MOLNÁR, J., VINCE, T.: Optimisation of radio-frequency irradiation conditions for neuro-degenerative effects observation in living organism. In: Nové trendy rozvoja letectva: 7. medzinárodná vedecká konferencia, Košice, 6.-8.9.2006, str. 117-117, ISBN 8080735190
- KOVÁČOVÁ, I., KOVÁČ, D., VINCE, T.: Elektromagnetická kompatibilita. 1. vydanie, TU Košice, 2009, 137 strán, ISBN 978-80-553-0150-1
- KOVÁČ, D., KOVÁČOVÁ, I., MOLNÁR, J.: Elektromagnetická kompatibilita – meranie. 1. vydanie, TU Košice, 2009, 71 strán, ISBN 978-80-553-0151-8
- ZANGRANDO, D., ZALATEU, M.: Design of the Magnets for the ELETTRA Booster. In: Booster Synchrotron Report, Sincrotrone Trieste, December, 2001, 30 pages.
- ŠIMKO, V., KOVÁČ, D., KOVÁČOVÁ, I.: Teoretická elektrotechnika I.. Vydavateľstvo Elfa s.r.o. Košice, 2002, 173 strán, ISBN 80-89066-27-5.
- KOTAL, M., NOVOTNÝ, P., VOŽENÍLEK, P.: Příklady výpočtů elektrických strojů točivých. Ediční středisko ČVUT Praha, leden 1988.
- PÁLKA, R.: Elektrické stroje IV – navrhovanie jednosmerných strojov. Edičné stredisko SVŠT v Bratislave, október 1983.
- TOMČÍKOVÁ, I., MOLNÁR, J., VINCE, T.: Interakcia magnetického poľa a napätosti pre elastomagnetický snímač tlakovej sily. In: Elektrorevue. No. 34 (2008), p. 34-1-34-11, ISSN 1213-1539
- HODULÍKOVÁ, A., VINCE, T., MOLNÁR, J.: The computer-aided solution of magnetostatic fields of elastomagnetic sensor. In: Transactions of KMOSU. Vol. 4, no. 2 (2010), pp. 84-90, ISSN 2072-8263
- DOLEŽEL, I., ŠKRAMLÍK, J., VALOUCH, V. Design of Inverter-Fed Induction Motor Drive Systems With Regard to EMC Problems. In: Proc. of Int. Conf. on Advanced Engineering Design, University of Glasgow, Faculty of Engineering, Glasgow, Scotland, 24-26 June 2001, pp. 27-322.
- VINCE, T., MOLNÁR, J., BUČKO, R.: Real-time regulation systems based on internet – optimization algorithm. In: Transactions of KMOSU. Vol. 4, no. 3 (2010), p. 150-153, ISSN 2072-8263.
- VINCE, T., MOLNÁR, J., TOMČÍKOVÁ, I.: Remote DC motor speed regulation via Internet. In: Proceeding of OWD 2008, pp. 293-296, ISBN 8392224248
- MOLNÁR, J., VINCE, T.: Telemetric expert system based on Internet. In: AMTEE ’09, Plzeň, University of West Bohemia, 2009, pp.1-4, ISBN 9788070438213
- VINCE, T., MOLNÁR, J.: Remote mechatronic system control over the internet. In: Electromechanical and energy systems, modelling and optimization methods : conference proceedings of the 8th science and technical conference of beginners in science and industry, April 08-09, 2010, Kremenchuk, Ukraine, pp. 28-30, ISSN 2079-5106
- VINCE, T., MOLNÁR, J.: Remote measurements of variable topology system. In: Annals of DAAAM for 2011 & Proceedings of the 22nd International DAAAM Symposium on “Intelligent Manufacturing & Automation : Power of Knowledge and Creativity”: 23-26th November 2011, Vienna, Austria, pp. 1179-1180, ISSN 1726-9679
- VINCE, T., KOVÁČ, D., MOLNÁR, J.: VMLab in the education. In: Sistemas y Tecnologías de Información : Actas de la 7ª Conferencia Ibérica de Sistemas y Tecnologías de Información : Madrid, Estaňa, 20 al 23 de Juno de 2012, pp. 334-338, ISBN 978-989-96247-7-1
- VINCE, T., MOLNÁR, J.: Distance remote via Internet. In: ELITECH 2005. – Bratislava : Slovak University of Technology, 2005, str. 45-47

