Robot Snail
06. Júl, 2016, Autor článku: Mihaľov Juraj, Elektrotechnika
Ročník 9, číslo 7  Pridať príspevok
Pridať príspevok
![]() Táto práca je poukazuje na výhody robotov vytvorených pomocou LEGO EV3 v priemysle, najmä ako alternatíva ľudskej sily v život ohrozujúcich situáciách. V práci sú popísané jednotlivé časti robota, jeho vývoj a jeho funkcionality. Najdôležitejším vedeckým prínosom je poukázanie na pevnú konštrukciu robota a jeho výkon, pričom ide o lacné komerčné riešenie. Bez veľkých programátorských znalostí a veľkých finančných investícií je možné vytvoriť robota lezúceho na komín a z neho, schopného vykonávať rôzne merania a autonómne sa pohybovať.
Táto práca je poukazuje na výhody robotov vytvorených pomocou LEGO EV3 v priemysle, najmä ako alternatíva ľudskej sily v život ohrozujúcich situáciách. V práci sú popísané jednotlivé časti robota, jeho vývoj a jeho funkcionality. Najdôležitejším vedeckým prínosom je poukázanie na pevnú konštrukciu robota a jeho výkon, pričom ide o lacné komerčné riešenie. Bez veľkých programátorských znalostí a veľkých finančných investícií je možné vytvoriť robota lezúceho na komín a z neho, schopného vykonávať rôzne merania a autonómne sa pohybovať.
1. Úvod
Potenciálu robotov vytvorených LEGO platformou sa venovalo už niekoľko štúdií, ktoré poukazujú na ich všestrannosť. Napríklad E. Cuevas [1] sa venoval možnostiam a obmedzeniam mobilných robotov v dvoch štúdiách: Prvá bola zameraná na konštrukciu robotického vozidla tak, aby bolo schopné sledovať preddefinovanú cestu. Druhá sa venuje problematike pozičnej kontroly. Náš zámer je podobný, ako v týchto štúdiách. Hľadali sme nízkonákladové riešenie robota, ktorý by pomáhal človeku v jeho činnosti, alebo by ho úplne nahradil. Pri tvorbe robota bol použitý starší model LEGO kocky NTX ako aj novší model EV3. Tieto dva modely LEGO riadiacich jednotiek aj porovnávame.
Našou hlavnou hypotézou je: Nízkonákladové roboty môžu byť flexibilnou alternatívou ľudskej sily pri život ohrozujúcich povolaniach a sú ľahko rekonfigurovateľné podľa momentálnych potrieb. S cieľom dokázať túto hypotézu sme vytvorili robota Snaila. Ide vo všeobecnosti o flexibilného nízkonákladového robota, ktorý vie liezť na rebrík a po pripojení senzorov dokáže merať napríklad elektromagnetické žiarenie, CO2, v závislosti od aktuálnych potrieb. Robot bol skonštruovaný študentami a mal úspechy na niekoľkých súťažiach.
Existuje viacero podobných projektov, avšak nie je ich mnoho, ktoré dokážu asistovať človeku pri život ohrozujúcich povolaniach. Napríklad S.Moor vyvinul lacné a flexibilné robotické sady vrátane hardware a software [2], pričom sada stojí zhruba 1200$. Jeho sady umožňujú vytvoriť robota schopného merať teplotu a prietok vzduchu. Pre experimentálne účely je možná aj implementácia systému napríklad do domácnosti a vytvorenie tak inteligentnej domácnosti [3]. Hardware je kompatibilný so software MATLAB a Labview, čo zabezpečuje vysokú flexibilitu, jednoduché intuitívne programovanie a ladenie vytvoreného systému. Pri správne navrhnutom a vyladenom systéme je možné preprogramovať systém na diaľku a sledovať jeho stav, či už vo video, textovej alebo grafickej podobe.
V súčasnosti je množstvo jazykov a kompilátorov podporujúcich LEGO platformu, ktoré poskytujú veľmi intuitívne pracovné prostredie. Autori [4] tvrdia, že kvalitné riadenie v reálnom čase potrebuje pracovať so zložitými matematickými operáciami, s posuvnou desatinnou čiarkou. Preto sa rozhodli, že ako kompilátor implementujú ROBOTC. Autori [1] však poukazujú na to, že je možné aj zložitejšie problémy riešiť elegantnými programovacími krokmi a vyhnúť sa zložitému programovaniu. To je dôvod, prečo sme sa rozhodli programovať robota Snaila v programe LabView s pridaným rozšírením LEGO Mindstorms, podobne ako autori [4]. Labview je programovacie prostredie, ktoré dokáže zabezpečiť zber dát od hardware, je v ňom množstvo užitočných knižníc, umožňuje jednoduché nastavenie používateľského rozhrania a je veľmi často používané v oblasti riadenia [5] [6]. V nasledujúcej časti predstavíme robota Snaila, jeho software, konštrukciu a v závere zaujmeme postoj k mobilným robotom.
2. Robot Snail
Pokiaľ ide o hypotézu, od experimentu sme očakávali, že nájdeme IT riešenie ako nahradiť ľudskú silu pri život ohrozujúcej práci a že skonštruujeme mobilného robota nenáročného ako na software tak na hardware. Snažili sme sa vytvoriť lacného robota, ktorý bude ľahko preprogramovateľný podľa aktuálnych požiadaviek. Na robotovi spolupracovali študenti strednej školy, pričom sa predpokladalo, že budú schopní zostaviť a naprogramovať robota s daným software a LEGO Mindstorm. Ich motiváciou boli nové poznatky, chuť urobiť niečo hmatateľné a byť úspešní na súťažiach.
2.1 Front-end
Kostru robota Snail tvorí zliatina medi, horčíka a hliníka známa ako dural (Al-Cu4-Mg). Ako uvádza [7], tento materiál zaručuje pevnú a ľahkú konštrukciu. Celá kostra sa skladá z niekoľkých profilov ktoré tvoria jeden navzájom spolupracujúci celok. Telo robota je pripravené tak, aby mal používateľ jednoduchý prístup k jednotlivým riadiacim častiam či k dôležitým prvkom elektroniky. Spodná časť robota pozostáva z jedného páru navzájom rovnobežných a súmerných ramien. Tie sú samostatne zakončené rádiusovým profilom (pozri obr. 1). Aby bolo zabránené treniu, museli byť obe tieto časti vyhladené a ohnuté do správneho uhla ([8] [9]).
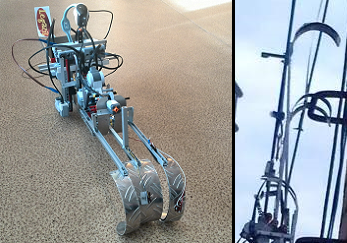
Obr.1 Konštrukcia robota
Obr.2 Konštrukcia robota, profil
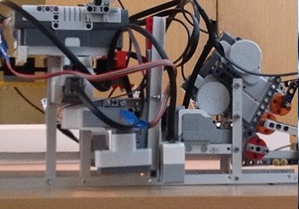
Ťažisko robota tvorí tkz. klietka, ktorá obsahuje riadiace jednotky, v ktorých uložený program riadiaci činnosť robota. Riadiace jednotky komunikujú prostredníctvom zapojenia daisy chain (USB 2.0) [10]. Prepojením daisy chain je možné prepojiť až 4 jednotky, čím sa dá robot rozšíriť o ďalších 8 portov na jednu kocku. Tie sa delia na 4 motorové a 4 senzorové porty.
Na pravej strane je umiestnený 8-portový multiplexor pre motory, ktorý je pripojený k EV3 kocke ako senzor. Takýmto zapojeným získavame možnosť napojiť okrem 4 LEGO motorov (pre jednu kocku) ďalších štandardných 8 servomotorov Hitec alebo Futaba. Na rozdiel od LEGO motorov, ktoré sa napájajú priamo, sú výkonnejšie, no náročnejšie na údržbu. Napájanie pozostáva z akumulátora s kapacitou 5200mAh, s napätím 7.4V. Tieto motory sme upravovali zo stepper motorov na continous, teda motory, ktoré nemajú blokovanie otáčania okolo celej svojej osi. Motory, z ktorý je odstránená zábrana proti otáčaniu však strácajú možnosť nastavenia presnej polohy. S continous motormi sa pracuje na princípe štart-stop vďaka dotykovým senzorom.
Vertikálny pohyb Snaila je zabezpečený stredným ramenom, ktoré je vybavené ozubeným kolesom osadeným do ozubenej koľaje, farebným senzorom a dvoma dotykovými senzormi. Rameno je pripevnené na dva servomotory, ktoré s ním pohybujú dopredu, dozadu a v určitom uhle aj nahor a nadol. Moment zmeny polohy sa určuje podľa farby (červená, modrá), ktorú zachytí na chvoste robota farebný senzor. Teda ak pri pohybe senzor zaznamená modrú farbu, je to signál pre riadiacu jednotku, že ma rameno zodvihnúť. Ak zaznamená červenú farbu, jednotka to chápe ako signál pre pohyb ramena nadol. Vďaka nastaviteľným farebným bodom sa dá moment zmeny polohy stredného ramena kedykoľvek fyzicky nastaviť, teda robot sa dokáže v pohybovať spoľahlivo po rebríkoch s dĺžkou schodu od 35 až po 70 centimetrov. Dotykové senzory sú na koncoch ramien po dĺžke 15 cm. Teda, aj pri rozličnom rozstupe jednotlivých schodov, je robot schopný vyliezť bez problémov.
2.2 Back-end
Chod robota zabezpečuje riadiaci systém uložený v EV3 kockách. Tie sú rozdelené podľa funkcie do hlavnej a vedľajšej. Vedľajšia jednotka sníma prostredie a odosiela údaje do hlavnej jednotky, ktorá na základne získaných informácií prispôsobuje jednotlivé kroky robota prostrediu. Program je vytvorený tak, aby každý krok robota tvoril samostatný blok programu. Teda po ukončení ľubovoľného kroku, sú vykonané merania, na základe ktorých program pripraví ďalší krok. Výhodou takejto štruktúry programu je, že ak je potrebné robota prispôsobiť inému prostrediu, nie je potrebné meniť celý program. Každé rameno má vlastný tlakový senzor, ktorého stlačenie znamená ukončenie daného kroku.
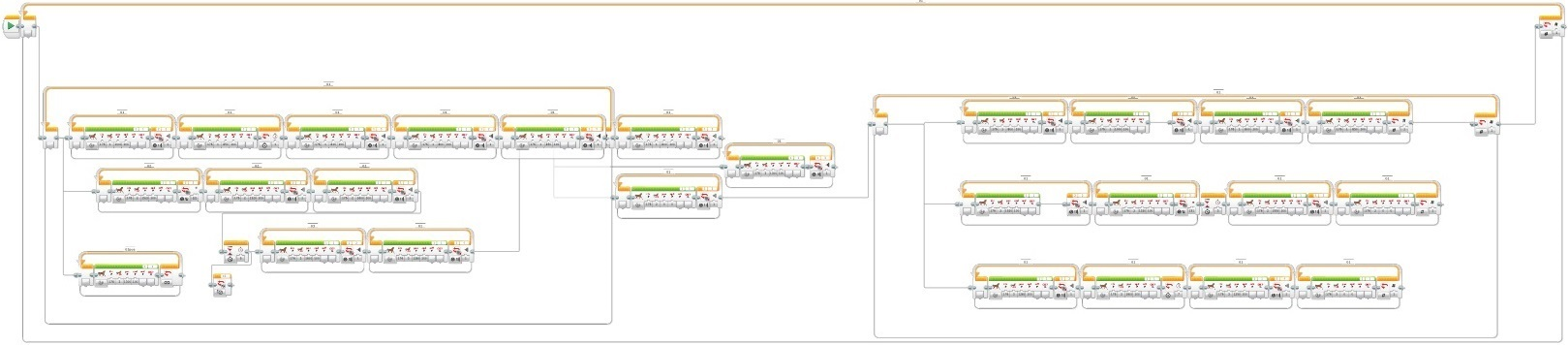
Obr. 3. Grafická ukážka časti programu robota
Aby mohli spolu komunikovať viaceré riadiace jednotky, je potrebné ich pomenovať. Riadiace jednotky sa volajú Master a Slave [11]. Program uložený v hlavnej jednotke master riadi všetky procesy, ktoré riadia pohyby ramien. Vedľajšia jednotka je zameraná na senzory a zber informácií z okolia, kde každá informácia má určitý vplyv na pohyb ramena. Ako už bolo niekoľko krát spomenuté, základný chod robota riadia jednotky EV3, avšak niektoré súčasti robota tvoria komponenty z predošlej verzie, NXT (napr. v [4]). Po otestovaní parametrov oboch jednotiek vyhrala v značnej miere jednotka EV3.
Tab. 1 parametrové porovnanie LEGO EV3 a NXT
| NXT | EV3 | |
|---|---|---|
| Procesor | Atmel 32-bit ARM | ARM9 |
| RAM | 64kB | 64MB |
| Flash | 256kB | 16MB |
| OS | Proprietary | Linux-based |
| SD karta | n/a | Micro SD 32 GB |
| Inteligentné zariadenia | Android | Android/Apple |
| WiFi | No | Yes |
| Bluetooth | Yes | Yes |
| Display | 100×64 | 178×128 |
| Sensorové porty | 4 | 4 |
| Motorové porty | 3 | 4 |
| USB port | USB 2.0 | USB mini |
3. Záver
Skonštruovali sme nízko nákladového robota, ktorý dokáže liezť po rebríku pomocou farieb a dotykových senzorov. Je schopný merať rôzne veličiny či zaznamenávať informácie prostredníctvom širokej škály vymeniteľných senzorov. Riadiace jednotky sú prepojené medzi sebou systémom daisy chain, avšak vďaka bezdrôtovému pripojeniu je možné prepojiť aj viacero robotov medzi sebou. Jedným z najdôležitejších faktov je, že robot nebol vytvorený nákladnou či zložitou technológiou. Vďaka použitiu stavebnice LEGO MINDSTORM sme boli schopný zostrojiť robota so študentmi strednej školy. Duralová konštrukcia zabezpečuje ľahkú a pevnú konštrukciu robota, čo považujeme za ideálnu voľbu v pomere cena-kvalita.
Týmto projektom sme dokázali, že je možné vytvoriť nízko nákladového mobilného robota, ktorý dokáže byť alternatívou človeka v životunebezpečných situáciách. Robot Snail získal 4. miesto na súťaži nakomin 2014, 1. miesto v celoslovenskom kole festivalu vedy a techniky 2014 a čestné uznanie na súťaži ISWEEEP 2015 v Texase. V rámci budúcich projektov máme v pláne sústrediť sa na komplexné riešenia pre riadenie automatizovaných prostredí.
Bibliografia
- CUEVAS, E. — ZALDIVAR, D. — PÉREZ-CISNEROS, M.: Low-cost commercial LEGO c platform for mobile robotics, Journal of Electrical Engineering Education 47, No. 2 (2010) 132–150
- MOOR, S. — PIERGIOVANNI, P. — METZGER, M: Process control kits: A hardware and software resource, 2005, IEEE Frontiers in education, pp. T2G– 27
- HERCOG, D. — GERGIC, B. — URAN, S. — JEZ-ERNIK, K.: A DSP-based remote control laboratory, IEEE Transactions on industrial electronics 54, No. 6 (2007) 3057–3068
- GÓMEZ DE GABRIEL, J. — MANDOW, A. e — FERNÁNDEZ-LOZANO, J. — GARCÍA-CEREZO, A.: Using LEGO NXT mobile robots with LabVIEW for undergraduate courses on mechatronics, IEEE Transactions on education 54, No. 1 (2011) 41–57
- NITU, C. — GRAMESCU, B. — POMEAGA, C. — TRUFASU, A.: Optomechatronic system for position detection of a mobile mini-robot, IEEE Transactions on industrial electronics 52, No. 4 (2005) 969–973
- GARCÍA-CEREZO, A. — MANDOW, A. — MARTÍNEZ, L. — GÓMEZ DE GABRIEL, J. — MORALES, J. — CRUZ, A. — REINA, A. — SERÓN, J.: Development of ALACRANE: A mobile robotic assistance for exploration and rescue missions, 2007, IEEE SSRR2007, pp. 1–6
- PANDEY, A. — DUBEY, A.: Taguchi based fuzzy logic optimization of multiple quality characteristics in laser cutting of Duralumin sheet, Optics and lasers in engineering 50, No. 3 (2012) 328–335
- CANUDAS DE WIT, B.: A survey of models, analysis tools and compensation methods for the control of machines with friction, Automaica 30, No. 7 (1994) 1083–1138
- CAI, Y. — YANG, S.: A Survey on multi-robot systems, 2012, IEEE World Automation Congress (WAC), pp. 1–6
- ROBERTAZZI, T.: Processor equivalence for daisy chain load sharing processors, IEEE Transactions on aerospace and electronic systems 29, No. 4 (1999) 1216–1221
- BAPTISTA, L. — BÓIA, N. — MARTINS, J. — SÁDA COSTA, J.: Interaction control experiments for a robot with one flexible link, Informatics in control automation and robotics 15, No. 1 (2008) 155–168 LEGO c Mindstorms Gallery [cited: 03.03.2015]
http://www.lego.com/en-us/mindstorms/ gallery
Spoluautorom článku je Ľubor Leščišin, Katedra počítačov a informatiky, fakulta elektrotechniky a informatiky, Technická univerzita v Košiciach, Letná 9, 04200 Košice, Slovensko

