Meranie vplyvu uhlov komutácie na index účinnosti trojfázového BLDC motora
08. August, 2016, Autor článku: Bober Peter, Elektrotechnika
Ročník 9, číslo 8  Pridať príspevok
Pridať príspevok
![]() Riadiaci obvod BLDC motora so snímačmi využíva informáciu o polohe rotora na určenie uhla komutácie prúdu z jednej cievky statora na druhú. Vhodný okamih komutácie prúdu ovplyvňuje účinnosť motora, zvlnenie momentu a hlučnosť. Článok sa zaoberá meraním vplyvu presnosti ulov komutácie na index účinnosti, ktorý je za určených podmienok úmerný účinnosti. Z nameraných výsledkov vyplýva, že pri riadení motora podľa vstavaného Hallového snímača nie je účinnosť motora maximálna a jednotlivé hrany signálov sú posunuté oproti optimálnym. Vhodnou metódou bude možné nájsť presné polohy pre všetky komutačné uhly.
Riadiaci obvod BLDC motora so snímačmi využíva informáciu o polohe rotora na určenie uhla komutácie prúdu z jednej cievky statora na druhú. Vhodný okamih komutácie prúdu ovplyvňuje účinnosť motora, zvlnenie momentu a hlučnosť. Článok sa zaoberá meraním vplyvu presnosti ulov komutácie na index účinnosti, ktorý je za určených podmienok úmerný účinnosti. Z nameraných výsledkov vyplýva, že pri riadení motora podľa vstavaného Hallového snímača nie je účinnosť motora maximálna a jednotlivé hrany signálov sú posunuté oproti optimálnym. Vhodnou metódou bude možné nájsť presné polohy pre všetky komutačné uhly.
1. Úvod
Rôzne typy motorov s permanentnými magnetmi (PM) sú výrazným konkurentom najrozšírenejších asynchrónnych motorov v aplikáciách ako sú ventilátory alebo trakčné jednotky pre pohon rôznych typov vozidiel. V štúdii [1] bol porovnávaný asynchrónny motor a motor s PM určený pre pohon elektromobilu. Porovnávanie bolo robené podľa viacerých kritérií a autori konštatujú, že motor s PM má vyššiu priemernú účinnosť avšak jeho cena je skoro dvojnásobná oproti cene asynchrónneho motora. Dôvodom je rast cien permanentných magnetov zo vzácnych zemín. Napriek tejto nevýhode sú oblasti, kde prednosti motorov s PM prevýšia ich nedostatky. Príkladom sú pohonné jednotky bezpilotných lietadiel. Tu je podstatná nízka hmotnosť.
Veľká skupina motorov s PM používa snímače polohy rotora na určenie okamihu komutácie prúdu z jedného statorového vinutia na druhé. Komutácia sa vykonáva elektronicky a motory neobsahujú mechanický komutátor s kefkami. Preto sa tieto motory označujú aj ako bezkefové alebo BLDC (Brushless Direc Current). Sú napájané jednosmerným napätím a majú podobnú momentovú charakteristiku ako jednosmerný motor. Na rozdiel od jednosmerného motora sú menej poruchové, vyžarujú menej rušenia a nepotrebujú údržbu.
Najčastejším typom snímačov polohy sú Hallové snímače magnetického poľa. Signál zo snímačov určuje uhly natočenia rotora, pri ktorých dochádza ku komutácii prúdu v statorových vinutiach. Správny uhol komutácie ovplyvňuje účinnosť motora, ako je uvedené v prácach [2], [3], [4] a [5]. Meraním účinnosti pre dvojfázový BLDC motor so záťažou s ventilátorovou charakteristikou sa zaoberal článok [2], kde bolo poukázané na problém presnosti merania. V práci [3] autori štatisticky vyhodnocujú signály z Hallových snímačov a konštatujú fakt, že poloha jednotlivých hrán signálov sa náhodne mení. Autori vyhodnocujú účinnosť vzhľadom na spoločnú zmenu polohy Hallových snímačov. Práca [4] analyzuje závislosť medzi uhlom komutácie a úrovňou akustického hluku. Pri znížení účinnosti sa časť energie prejaví ako hluk.
Predmetom tohto článku je analýza vzťahu medzi umiestnením Hallových snímačov polohy rotora a účinnosťou BLDC motora. Na rozdiel od predchádzajúcich prác bol sledovaný vplyv na účinnosť nie len od spoločného posunu snímačov ale aj od individuálnej polohy jednotlivých snímačov a od posunu vzostupnej a zostupnej hrany signálu každého snímača.
2. Trojfázový BLDC motor
BLDC motor je v podstate synchrónny stroj. Skladá sa zo statora s troma vinutiami a rotora s permanentnými magnetmi. Statorové vinutia sú priestorovo posunuté o 120° a postupným pripájaním cievok sa vytvára točivé magnetické pole, ktoré unáša rotor. Správny okamih komutácie prúdu z jednej cievky statora na druhú je určený snímačmi polohy. Na obr.1 v strede je znázornené pripojenie statorového vinutia so spoločným stredom na menič. V spodnej časti obrázka je rozmiestnenie trojice Hallových snímačov polohy okolo dvojpólového rotora. Priebeh signálov z Hallových snímačov pre vyznačený smer otáčania je na obr.1 vpravo, kde sú označené uhly komutácie statorových prúdov α0 až α5. Riadiaca logika vyhodnocuje stav signálov a pripája jednotlivé cievky motora na napájacie napätie tak, aby medzi statorovým poľom a magnetom rotora vznikal točivý moment.
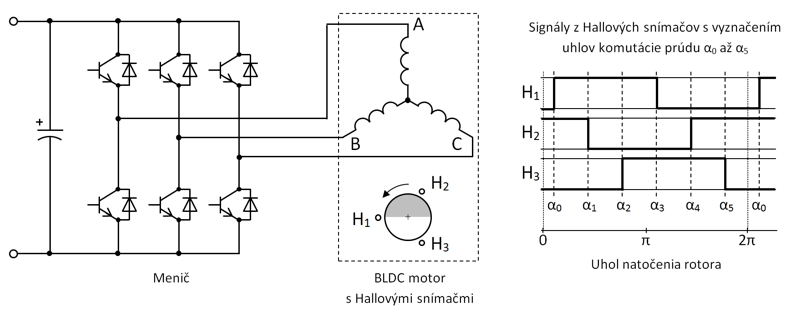
Obr.1 Pripojenie trojfázového BLDC motora na menič, umiestnenie Hallových snímačov, komutačné uhly
3. Nerovnomernosť signálov zo snímačov
Počas jednej otáčky trojfázového motora s dvojpólovým rotorom dochádza ku komutácii prúdu šesť krát. Okamih komutácie je určený polohou signálu zo snímačov. Snímače snímajú buď priamo pole rotora alebo je v motore dodatočný magnet. Konkrétny uhol komutácie závisí od mechanického umiestnenia snímačov a od veľkosti okolitého magnetického poľa. Ak má stroj viac pólových párov, potom na jednu mechanickú otáčku pripadne viac elektrických otáčok a počet uhlov komutácie sa úmerne zväčší. Na obr.2 je znázornených 30 uhlov komutácie na jednu mechanickú otáčku pre rotor s piatimi pólovými dvojicami.
Na obr.3a sú zobrazené odchýlky komutačných uhlov od rovnomerného kroku 12° (360°/30) namerané na motore BLDCMOT2454 od firmy MotorSolver (PN = 350 W; UN = 42 V; IN = 5,7 A; nN = 4000 ot./min; p = 5). Z grafu je zrejmé, že uhly nie sú rozložené rovnomerne. Na obr.3b sú tie isté odchýlky uhlov usporiadané podľa príslušnosti k snímačom H1 až H3. Z tohto grafu je jasné, že jednotlivé snímače nie sú rovnomerne posunuté o 120° elektrických. Väčšina hrán signálu H1 má kladnú odchýlku uhla a hrany signálu H2 majú zápornú odchýlku uhla. Z nameraných výsledkov vyplýva, že každý z tridsiatich uhlov môže byť posunutý oproti ideálnej polohe.
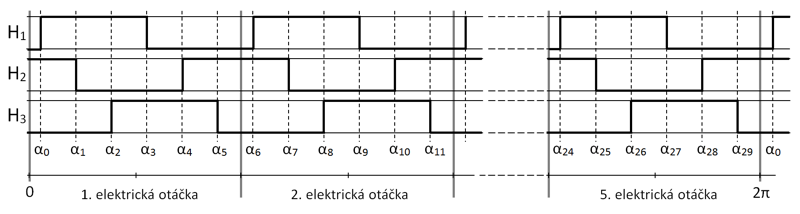
Obr.2 Uhly komutácie prúdov α0 až α29 pre BLDC motor s piatimi pólovými dvojicami
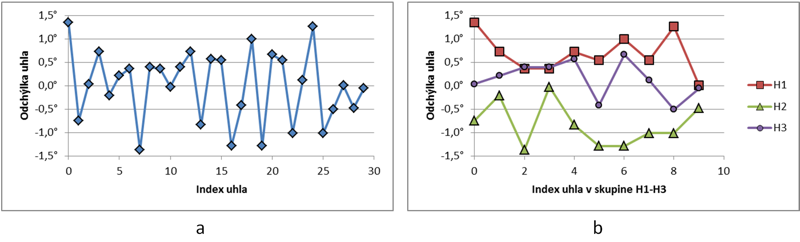
Obr.3 Odchýlky komutačných uhlov od hodnôt s rovnomerným krokom 12° (a). Odchýlka uhlov usporiadaná podľa snímačov H1, H2 a H3 (b)
4. Index účinnosti
Posúdenie odchýlky komutačných uhlov od ideálnej polohy je možné urobiť podľa viacerých kritérií. Najčastejšie kritériá sú:
- účinnosť,
- zvlnenie momentu,
- akustický hluk.
V tomto článku je uvedené meranie tzv. indexu účinnosti E. Index účinnosti je relatívne číslo úmerné účinnosti η. Účinnosť je podiel mechanického výkonu P2 k elektrickému príkonu P1:
 |
(1) |
Pri voľne bežiacom motore budeme za mechanický výkon P2 považovať súčin trecieho momentu Mt a uhlovej rýchlosti ω:
 |
(2) |
kde n sú otáčky. Elektrický príkonu P1 je súčin napájacieho napätia U a celkového prúdu zo zdroja I:
 |
(3) |
Po dosadení (2) a (3) do (1) je účinnosť vyjadrená ako:
 |
(4) |
Z vykonaných meraní bolo zrejmé, že otáčky n pri meraní jedného uhla sa menia v malom rozsahu. Preto zmeny trecieho momentu Mt v závislosti od otáčok zanedbáme a ďalej rátame s konštantnou hodnotou. Tak isto napájacie napätie U je konštantné, pretože celý menič je napájaný zo stabilizovaného zdroja. Ak zo vzťahu (4) vynecháme konštanty, potom dostávame výraz pre index účinnosti E, ktorého hodnota je úmerná účinnosti:
 |
(5) |
5. Meranie vplyvu uhla komutácie na index účinnosti
Meranie vplyvu uhla komutácie na index účinnosti bolo vykonané na motore BLDCMOT2454. Motor bol napájaný z jednosmerného stabilizovaného zdroja cez menič s obvodom L6234, ktorý bol ovládaný signálovým procesorom TMS320F28335. Celkový napájací prúd sa meral digitálnym multimetrom. Uhol natočenia rotora sa snímal inkrementálny snímačom a jeho hodnota sa porovnávala s určenými komutačnými uhlami. Program zabezpečil postupné pripájanie jednotlivých vinutí statora na napájacie napätie podľa okamžitého uhla natočenia, čím sa realizovala funkcia elektronického komutátora. V troch skupinách meraní sa menilo 30 komutačných uhlov nasledovne:
1. Spoločný posun uhlov o hodnotu α od hodnoty αi získanej z Hallových snímačov. Hodnota nového komutačného uhla α‘i je vyjadrená ako:
 |
(6) |
2. Posun uhlov jednotlivých snímačov H1, H2 a H3 o hodnoty αH1, αH2 a αH3:
 |
(7) |
3. Posun jednotlivých hrán signálov zo snímačov H1, H2 a H3, pričom prvá hrana signálu H1 sa posúva o uhol αH11, druhá hrana H1 o uhol αH12 atď.:
 |
(8) |
Meranie každej hodnoty indexu účinnosti trvalo 10 sekúnd, pričom prvé dve sekundy slúžili na ustálenie rýchlosti po zmene posunu komutačných uhlov a v ďalších ôsmich sekundách sa každú sekundu urobilo meranie otáčok a prúdu. Výsledná hodnota indexu účinnosti sa vypočítala z priemeru nameraných prúdov a otáčok. Pred meraním bolo potrebné nechať motor v chode aspoň 15 minút aby sa ustálila teplota motora, ktorá ovplyvňuje hodnotu indexu účinnosti. Na obr.4a je nameraná závislosť napájacieho prúdu od spoločného posunu uhla komutácie α pre rôzne hodnoty napájacieho napätia. Na obr.4b je podobne znázornená závislosť indexu účinnosti. Z grafov je zrejmé, že maximálna hodnota indexu účinnosti sa nachádza pri posune asi -2°. To znamená, že pri terajšom umiestnení snímačov motor nedosahuje najvyššiu možnú účinnosť.
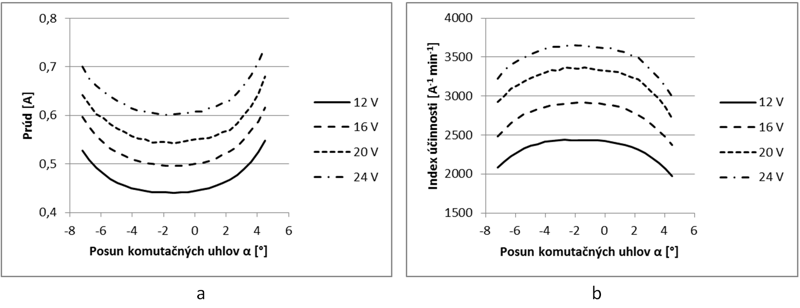
Obr.4 Závislosť prúdu (a) a indexu účinnosti (b) od spoločného posunu komutačných uhlov α
Na obr.5 je nameraná závislosť indexu účinnosti od posunu uhlov jednotlivých snímačov H1, H2 a H3. To znamená že nábežná a dobežná hrana signálu každého snímača sa posúva spoločne. Z grafov je zrejmé, že na dosiahnutie maximálnej hodnoty indexu účinnosti vyžadujú jednotlivé snímače iný uhol posunutia. Tento výsledok zodpovedá meraniu uhlov komutácie na obr.3b, z ktorého vyplynulo, že jednotlivé snímače nie sú voči sebe natočené o rovnaký uhol.
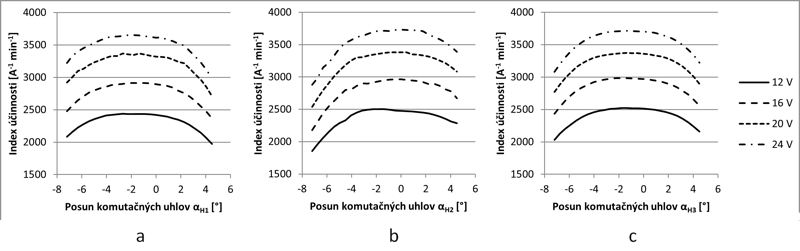
Obr.5 Závislosť indexu účinnosti od uhlov posunu αH1, αH2 a αH3 jednotlivých snímačov H1, H2 a H3
Závislosť indexu účinnosti od posunu αH11 až αH32 jednotlivých hrán signálov snímačov H1, H2 a H3 je na obr.6. Z grafu vyplýva, že každá hrana signálu má svoj vlastný posun pre maximálnu hodnotu indexu účinnosti.
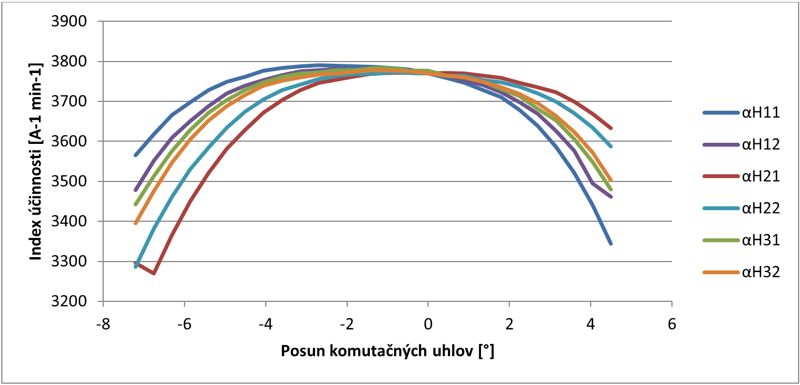
Obr.6 Závislosť indexu účinnosti od uhlov posunu αH11 až αH32 (napájanie 24V)
6. Záver
V článku sú uvedené namerané hodnoty indexu účinnosti v závislosti na posunutí komutačných uhlov BLDC motora od uhlov referenčnej hodnoty určenej Hallovými snímačmi polohy rotora. Index účinnosti je pomerná veličina, ktorá je úmerná účinnosti motora v prípade, ak sa rýchlosť otáčania veľmi nemení a napájacie napätie je konštantné. Táto podmienka je splnená, pretože BLDC motor s elektronickou komutáciou prúdov podľa snímačov má podobnú charakteristiku ak jednosmerný motor a jeho otáčky sú úmerné napájaciemu napätiu, ktoré bolo počas merania konštantné. Merania boli vykonané na trojfázovom BLDC motore BLDCMOT2454, ktorého rotor má päť pólových dvojíc. To znamená, že na jednu mechanickú otáčku pripadá päť elektrických otáčok so šiestimi komutáciami a celkove dochádza k tridsiatim komutáciám počas jednej mechanickej otáčky. Meranie signálov zo snímačov ukázalo, že uhly jednotlivých hrán signálov sa odchyľujú v rozsahu ±1,4° od rovnomerného odstupu 12°.
Na motore boli urobené tri skupiny meraní indexu účinnosti. Pri prvom meraní sa menil jeden spoločný posun všetkých komutačných uhlov. V druhej skupine meraní sa posúvali tri uhly pre tri Hallove snímače a pri tretej skupine sa posúvali nezávisle nábežná a dobežná hrana signálu každého z troch snímačov, čo predstavuje šesť parametrov. Merania ukázali, že existuje optimálna hodnota posunu komutačných uhlov pri ktorej je index účinnosti najväčší. Optimálna hodnota je iná, ako hodnota komutačných uhlov určená vstavaným snímačom polohy rotora. Nepresnosť aktuálneho nastavenia sa pohybuje v rozsahu ±2°. Zároveň optimálna hodnota je rôzna pre posuny rôznych skupín uhlov. Môžeme teda konštatovať, že je možné vhodnou metódou nájsť optimálne hodnoty pre všetkých 30 komutačných uhlov. Vzhľadom na použitý odhad účinnosti pomocou indexu účinnosti nie je možné presne kvantifikovať o koľko je momentálne účinnosť motora nižšia ako by bola pri optimálnych komutačných uhloch. Tu je potrebné priame meranie mechanického výkonu na hriadeli motora dynamometrom s dostatočnou presnosťou.
Poďakovanie
Tento článok vznikol s podporou projektu VEGA 1/0464/15 „Výskum nových princípov a metód pre návrh elektrotechnických systémov“.
Literatúra
- Y. Guan, Z.Q. Zhu, I.A.A. Afinowi, J.C. Mipo, P. Farah: Comparison between induction machine and interior permanent magnet machine for electric vehicle application. COMPEL: The International Journal for Computation and Mathematics in Electrical and Electronic Engineering, Vol. 35 Iss 2, 2016, s. 72 – 585
- P. Bober: Measurement of BLDC Motor Efficiency for Commutation Angle Optimisation. MultiScience – 29. microCAD., Miskolc: University of Miskolc, 2015, s. 1-8.
- A. Sikora, A. Zielonka, B. Kulesz: Impact of Hall sensors positioning on symmetry of BLDC control signals. International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), 2012, Sorrento, 2012, s. 249-252. doi: 10.1109/SPEEDAM.2012.6264444
- S.J. Lee, J.P. Hong, W.K. Jang: Characteristics comparison of BLDC motor according to the lead angles. Vehicle Power and Propulsion Conference, 9-12 October 2012, Seoul, s. 879-883.
- B.G. Gu, J.H. Choi, I.S. Jung: Simple Lead Angle Adjustment Method for Brushless DC Motors. Journal of Power Electronics, 14(3), 2014, s. 541-548.
Katedra elektrotechniky a mechatroniky, Fakulta elektrotechniky a informatiky, Technická Univerzita v Košiciach

