Návrh a simulácia krokového motora s diskovým rotorom s permanentnými magnetmi
27. Marec, 2013, Autor článku: Kaňuch Ján, Elektrotechnika
Ročník 6, číslo 3  Pridať príspevok
Pridať príspevok
![]() V tomto príspevku je prezentovaný návrh a simulácia elektromagnetického poľa krokového elektromotora s axiálnym magnetickým tokom, ktorého rotor je diskový a obsahuje permanentné magnety. Krokový elektromotor s diskovým rotorom s permanentnými magnetmi má vysoký krútiaci a nízky moment zotrvačnosti, vysoký pomer krútiaceho momentu k hmotnosti motora, pomerne nízku potrebu energie pri vhodnom riadení, pričom neželezný rotor má minimálne straty v železe ak sú v ňom použité trvalé magnety uložené vo vrstvenom disku z nemagnetického materiálu. Tento elektromotor s diskovým rotor s permanentnými magnetmi je ideálny pre robotiku a CNC stroje.
V tomto príspevku je prezentovaný návrh a simulácia elektromagnetického poľa krokového elektromotora s axiálnym magnetickým tokom, ktorého rotor je diskový a obsahuje permanentné magnety. Krokový elektromotor s diskovým rotorom s permanentnými magnetmi má vysoký krútiaci a nízky moment zotrvačnosti, vysoký pomer krútiaceho momentu k hmotnosti motora, pomerne nízku potrebu energie pri vhodnom riadení, pričom neželezný rotor má minimálne straty v železe ak sú v ňom použité trvalé magnety uložené vo vrstvenom disku z nemagnetického materiálu. Tento elektromotor s diskovým rotor s permanentnými magnetmi je ideálny pre robotiku a CNC stroje.
Tento článok popisuje návrh štvor-fázového krokového motora s malým krokom a diskovým rotorom s permanentnými magnetmi. Je tu prezentovaný aj 3D model motora a simulácia elektromagnetického poľa, pričom výpočet momentu motora klasickou metódou bol kontrolovaný výpočtom metódou konečných prvkov na základe 3D modelu motora.
Úvod
Elektrické stroje s axiálnym tokom obsahujúce permanentné magnety (PM) sú stále viac používané z dôvodu stále sa zlepšujúcej kvality PM. Tieto stroje majú viacero jedinečných vlastností. Elektrické stroje s PM dosahujú spravidla vyššiu účinnosť a väčšiu hustota energie. Kvalitnejšie PM majú aj menšie rozmery, čo má za následok zmenšenie veľkosti magnetického obvodu stroja.
Diskové elektrické stroje s PM a s axiálnym magnetickým tokom majú niekoľko výhod oproti strojom s radiálnym magnetickým tokom. Disková stroje s PM s axiálnym tokom môžu byť navrhnuté tak, aby mali čo najvyšší pomer výkonu k hmotnosti stroja, čo sa dá dosiahnuť zmenšením hrúbky diskového rotora a ich výhodou sú aj rovinné (planárne) a ľahko nastaviteľné vzduchové medzery. A čo viac, hluk a úrovne chvenia sú menšie než v bežných strojoch. Tieto výhody uprednostňujú elektrické stroje s axiálnym tokom nad bežné stroje s radiálnym tokom v rôznych aplikáciách.
Diskový krokový elektromotor, tak ako aj valcovitý krokový elektromotor, môžeme porovnať s bezkefovým strojom. Poväčšine všetky vinutia v motore sú súčasťou statora a rotor je obojstranne drážkovaný disk z niektorého magneticky mäkkého materiálu (v prípade reluktančného motora) alebo z permanentných magnetov vhodného tvaru. Diskové krokové motory s permanentnými magnetmi sú elektromotory, ktoré v podstate sú svojou činnosťou porovnateľné s krokovými hybridnými motormi. Ale rotor v týchto diskových motoroch je väčšinou tenký disk, ktorý má veľmi malý moment zotrvačnosti v porovnaní s valcovým rotor v bežných hybridných krokových motoroch s permanentnými magnetmi.
1. Výhody krokového elektromotora s diskovým rotor
Keď chceme použiť krokový elektromotor s diskovým rotorom, tak musia mám byť známe hlavné výhody diskového rotora. Kvantitatívny rozdiel medzi krokovým elektromotorom s valcovitým rotorom a diskovým rotorom vyplýva zo vzájomného porovnania ich elektromagnetických využití. Z toho dôvodu je nutné formulovať merný ťah v aktívnej vrstve ako veličinu, ktorá vytvára točivý moment.
1.1 Merný ťah valcového rotora
Všeobecne v stavbe elektrických strojov je zavedená veličina σ, ktorá udáva priemerný merný ťah v aktívnej vrstve valca o priemere d a dĺžky l (Obr.1) :
 |
(1) |
kde F – je sila pôsobiaca na aktívnu vrstvu valca a M je krútiaci moment.

Obr. 1 Valcový rotor
Z rovnice (1) vyplýva všeobecne známa skutočnosť, že rozmerovým kritériom pre elektrický stroj s valcovým rotorom je kubatúra elektrického stroja. Táto objemová veličina a krútiaci moment valcového rotora elektrického stroja sú teda navzájom úmerné.
1.2 Merný ťah diskového rotora
Merný ťah v aktívnej vrstve diskového rotora je dvojnásobný a preto pre dve planparalelné vrstvy diskového rotora pre merný ťah platí nasledujúca rovnica:
![\sigma=\frac{F}{2[\pi (d-h)h]}](http://s0.wp.com/latex.php?latex=%5Csigma%3D%5Cfrac%7BF%7D%7B2%5B%5Cpi+%28d-h%29h%5D%7D&bg=ffffff&fg=000000&s=1 "\sigma=\frac{F}{2[\pi (d-h)h]}") |
(2) |
kde d – je vonkajší priemer medzikružia disku a h – je výška medzikružia (Obr. 2).
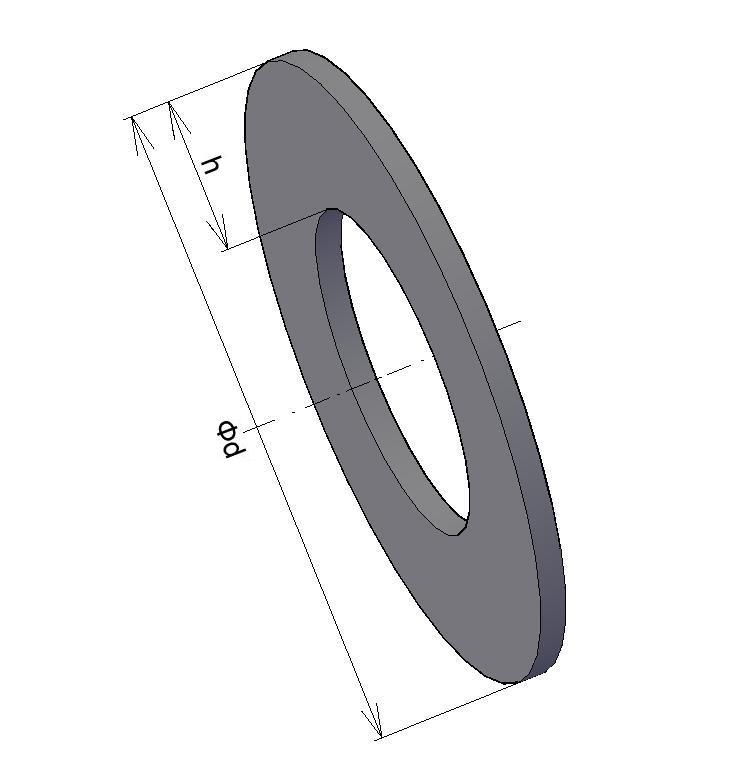
Obr. 2 Obojstranný diskový rotor
Sila F je ale veličina pre celý disk, teda pre obidve aktívne strany dvojvrstvy. Pre silu F v závislosti od momentu M diskového rotora platí rovnica:
}") |
(3) |
kde M – je krútiaci moment diskového rotora. Po dosadení rovnice (3) do rovnice (2) a jednoduchej úprave dostaneme pre merný ťah diskového rotora rovnicu:
^2 h}") |
(4) |
Z rovnice (4) vyplýva záver, že rozmerovým kritériom pri návrhu diskového motora je planárna (plošná) veličina:
^2 h") |
(5) |
Krútiaci moment motora M a planárna veličina (5) sú teda navzájom úmerné. Z rovníc (2) a (4) je zrejme, že elektrický stroj s diskovým rotor môže mať malú dĺžku, ktorá v podstate je závislá len na konštrukčných možnostiach výroby disku a na jeho mechanickej pevnosti. Dĺžka rotorového disku motora teda nie je podmienená jeho elektromagnetickými parametrami.
2. Konštrukčný návrh krokového motora s diskovým rotorom
Základom návrhu diskového krokového motora je určenie hlavných rozmerov diskového rotora. Podstatou je teda určenie vonkajšieho priemeru d a výšky medzikružia h rotorového disku (Obr. 2). Ďalšou dôležitou veličinou je krokovacia frekvencia. S týmito veličinami je úzko spätý uhol kroku, počet krokov za otáčku a maximálna rýchlosť otáčania.
2.1 Základné rozmery diskového rotora
Základné rozmery krokového motora s diskovým rotorom je možné určiť z planárnej veličiny, teda z modifikovanej rovnice (4):
^2 h = \frac{M}{\sigma \pi}") |
(6) |
Na základe predpokladanej výšky medzikružia disku h, potrebného krútiaceho momentu motora M a priemernej hodnoty merného ťahu σ, z modifikovanej rovnice (6) sa vypočíta vonkajší priemer diskového rotora d:
 |
(7) |
2.2 Počet krokov a krokovacia frekvencia diskového rotora
Krokové elektromotory s diskovým rotor sú bežne navrhované s rovnakým počtom pólov 2p ako je ich počet fáz m. Z tohto dôvodu pre krokový elektromotor s diskovým rotorom je výhodné používať ako charakteristickú veličinu počet fáz a nie počet pólov. Počet krokov na otáčku K diskového rotora je:
 |
(8) |
kde Q2 je počet drážok na rotore (zubov). Krokovacia frekvencia fs , ktorá je ďalšou sledovanou veličinou, je úmerná elektrickej frekvencii fe na výstupe napájacej jednotky krokového motora. Pre jeden mechanický krok je potrebný jeden elektrický impulz jednej fázy, takže v dôsledku toho po 2m krokoch sa opakuje elektrický impulz v tej istej fáze. Medzi mechanickou, teda krokovacou frekvenciou a elektrickou frekvenciou platí rovnica:
 |
(9) |
Elektrická frekvencia fe podľa rovnice (9) je teda relatívne nízka (čím vyšší je počet fáz motora) v porovnaní s mechanickou krokovacou frekvenciou fs. Ak by sme teda vybrali pomerne vysokú mechanickú krokovaciu frekvenciu napr. fs=15000 Hz, tak pre štvorfázový krokový elektromotor, teda pre 2m=8 je elektrická frekvencia fe=1875 Hz, čo je hodnota prijateľná pre stavbu napájacej jednotky krokového motora.
Ak by sme teda porovnali motory s rovnakým výkonom, tak pre štandardne vyrábané krokové motory s valcovým rotor je mechanická krokovacia frekvencia napr. fs=5000 Hz a k tomu prislúchajúca elektrická frekvencia je fe=1250 Hz. Z vyššie uvedeného porovnania je zrejme, že krokový elektromotor s valcovým rotorom má asi tretinovú mechanickú krokovaciu frekvenciu a elektrická frekvencia diskového krokového elektromotora je približne o 50% vyššia v porovnaní s krokovým motorom s valcovým rotorom.
2.3 Otáčky krokového motora s diskovým rotorom
Rýchlosť otáčania krokového elektromotora s valcovým aj diskovým rotorom sa vypočítajú zo všeobecne známej rovnice:
 [ot./mim.] [ot./mim.] |
(10) |
kde K je počet krokov na otáčku. Pre krokový elektromotor s diskovým rotor je však vhodné vyjadriť rýchlosť otáčania z modifikovanej rovnice (10) s použitím rovníc (8) a (9) rovnicou:
 [ot./mim.] [ot./mim.] |
(11) |
Krokový elektromotor s diskovým rotor pre K=200 krokov na otáčku a mechanickej krokovacej frekvencii fs=15000 Hz má otáčky vypočítané z rovnice (10) n=4500 ot./min. Záver z vyššie uvedeného je ten, že diskový krokový elektromotor má viac než dvojnásobnú rýchlosť v porovnaní s krokovým elektromotor s valcovitým rotor.
2.4 Výhody diskového krokového motora s permanentnými magnetami
Vývoj, a teda aj konštrukcia klasických krokových elektromotorov, bol rozdelený na dva smery:
- prvý smer bol krokový elektromotor bez budenia v rotore, ktorý pracoval na reluktančnom princípe,
- druhým vývojovým smerom bol krokový elektromotor s homopolárnym budením permanentným magnetom.
Ale skúsenosti z použitia krokových elektromotorov poukázali na to, že krokový elektromotor s homopolárnym permanentným magnetom má väčší krútiaci moment a začal sa čoraz častejšie využívať (s rozvojom polovodičových výkonových obvodov potrebných na jeho napájanie) v porovnaní s krokovým elektromotorom reluktančného typu, t.j. bez permanentného magnetu.
Avšak pri porovnaní výkonu diskového motora s axiálnym magnetickým tokom s výkonom objemovo rovnakého diskového motora, ktorý má podobné konštrukčné riešenie, ale je navrhnutý tak, že magnetický tok tečie v radiálnom smere, tak pri zachovaní približne rovnakého objemu obidvoch diskových motorov je výkon motora s axiálnym magnetickým tokom viac ako 50% vyšší, než výkon motora s radiálnym magnetickým tokom (Obr. 3).
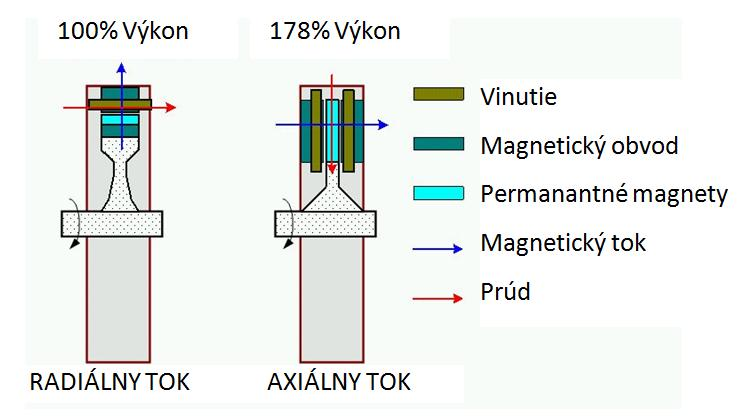
Obr. 3 Porovnanie výkonu diskového motora s radiálnym a axiálnym magnetickým tokom [3]
3. Návrh elektromagnetického obvodu diskového krokového motora s permanentými magnetmi
Základné rozmery elektromagnetického obvodu diskového krokového motora boli navrhnuté pomocou rovníc, ktoré sú uvedené v kapitolách 2.1 a 2.2. Hlavné parametre navrhovaného stroja sú uvedené v tabuľke 1.
Tab. 1 Hlavné parametre diskového krokového motora
| Parameter | Hodnota |
|---|---|
| Nominálne napätie | 64 V |
| Nominálny prúd | 5 A |
| Nominálny moment | 4 Nm |
| Počet fáz motora | 4 |
| Počet krokov na otáčku | 200 |
| Uhol kroku | 1,8o |
| Počet magnetov na rotore | 50 |
| Počet drážkovaných statorových pólov na fázu | 4 |
| Celkový počet statorových pólov | 16 |
| Počet zubov na statorovom póle | 3 |
| Počet závitov jednej fázy (4 cievky v sérii) | 196 |
V motore s permanentnými magnetmi a axiálnym tokom, ktorý má dva protiľahlé súmerné statory a jeden rotor z permanentných magnetov, môže byť rotor stroja vyrobený úplne bez železného jadra. To veľmi zjednodušuje výrobu rotora s permanentnými magnetmi. Samozrejme, že nedostatkom tohto riešenia je potreba dvoch statorov. V konštrukčnom usporiadaní s jedným rotorom s dvoma statormi sú teda permanentné magnety umiestnené v disku rotora, ako je zobrazené na obrázku 4.
Obr. 4 Usporiadanie elektromagnetického obvodu diskového krokového motora s PM
Základné rozmery navrhovaného elektromagnetického obvodu diskového krokového motora s permanentnými magnetmi sú uvedené v tabuľke 2.
Tab. 2 Rozmery elektromagnetický obvodu diskového krokového motora
| Parameter | Hodnota |
|---|---|
| Vonkajší priemer statora a rotorového disku | 140 mm |
| Vnútorný priemer statora a rotorového disku | 63mm |
| Šírka jarma statora | 10 mm |
| Celková dĺžka pólu statora | 21 mm |
| Počet krokov na otáčku | 200 |
| Výška telesa pólu | 16 mm |
| Šírka telesa pólu | 16 mm |
| Dĺžka telesa pólu | 18,5 mm |
| Dĺžka pólového nadstavca | 5 mm |
| Dĺžka vzduchovej medzery (na oboch stranách rotor) | 0,3 mm |
| Hrúbka permanentných magnetov (rotorového disku) | 3 mm |
| Uhol magnetu rotora | 3,6o |
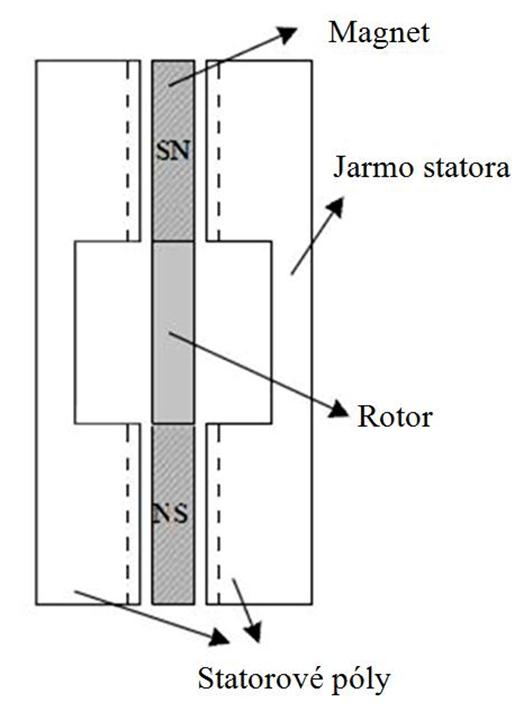
Na obrázku 5 je schématicky zobrazený rozvinutý rez magnetického obvodu krokového motora s diskovým rotorom s permanentnými magnetmi cez stredný priemer elektromagnetického obvodu.

Obr. 5 Rozvinutý rez magnetického obvodu krokového motora s diskovým rotorom s PM
4. Simulácia elektromagnetického poľa diskového krokového motora s permanentými magnetmi
V tejto časti sú uvedené výsledky simulácie krokového motora s axiálnym magnetickým tokom. Motor má vnútorný diskový rotor s permanentnými magnetmi bez drážok a dva vonkajšie súmerné statory s drážkovanými pólovými nadstavcami. Rotor tohto stroja bez železného jarma je zložený z axiálne magnetovaných plochých magnetov. Model elektromagnetického obvodu tohto krokového motor s diskovým rotorom z permanentných magnetov je vytvorený v programe ProEngineer a je zobrazený na obrázku 6.
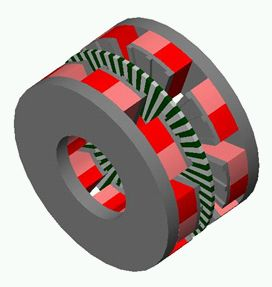
Obr. 6 Model elektromagnetického krokového motora s diskovým rotorom s PM
Magnetický tok sa uzatvára po obvode jarma statora a cez vzduchové medzery potom vstupuje do diskového rotora cez protiľahlé magnety opačnej polarity. Simulácia elektromagnetického poľa je urobená v simulačnom programe Cosmos/EMS. Ako okrajové podmienky je používaný tangenciálny tok. Všetky časti modelu elektromagnetického obvodu počas simulácie sú obklopené vzduchom (v skutočnosti je elektromagnetický obvod motora umiestnený v kostre motora). Na obrázku 7 je zobrazená sieť, ktorá bola použitá pri simulácii.
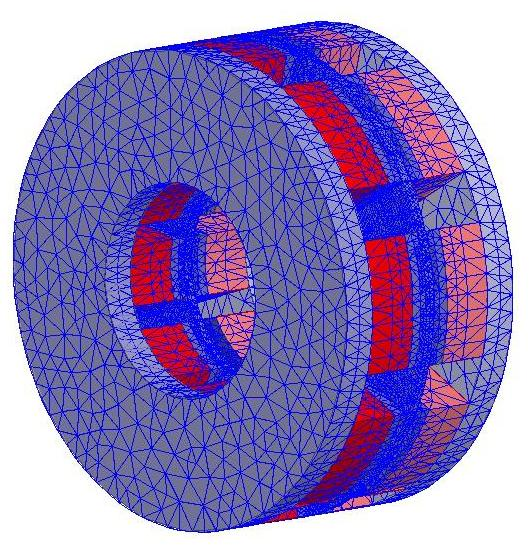
Obr. 7 Sieť použitá pri simulácii
Výsledky simulácie elektromagnetického poľa diskového krokového motora s axiálnym magnetickým tokom s permanentnými magnetmi sú zobrazené na obrázkoch 8, 9 a na obr. 10.

Obr. 8 Elektromagnetické pole diskového krokového motora s rotorom z PM (bez budenia)
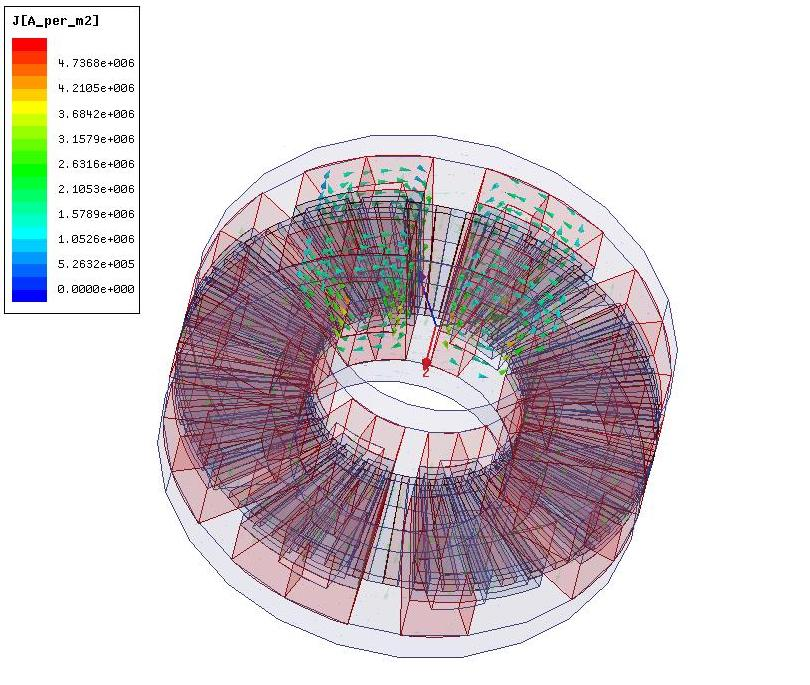
Obr. 9 Vektor prúdovej hustoty diskového krokového motora s rotorom z PM
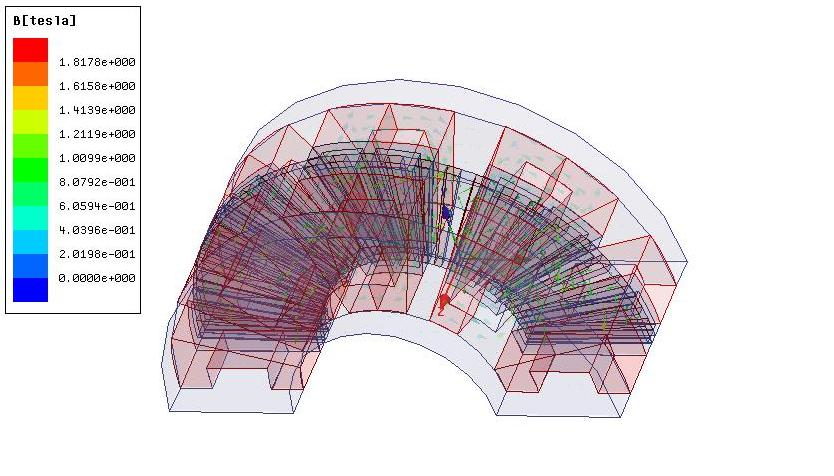
Obr. 10 Elektromagnetické pole diskového krokového motora s rotorom z PM v nabudenom stave
5. Záver
V tomto príspevku je navrhnutý diskový krokový motor s malým krokom (1,8°) s rotorom z permanentných magnetov. Podľa elektrických parametrov a rozmerov uvedených v kapitole 3 bol v programe ProEngineer vytvorený 3D model elektromagnetického obvodu navrhnutého krokového motora s diskovým rotorom z permanentných magnetov. Sú porovnané výsledky z návrhu a simulácie tohto motora v simulačnom programe Cosmos/EMS.
Výpočet momentu motora klasickou metódou bol kontrolovaný výpočtom metódou konečných prvkov na základe 3D modelu motora. Vypočítaný statický moment metódou konečných prvkov v polohe pred vykonaním kroku je 4,08 Nm a rozdiel je len 0,08 Nm (t.j. 2%), čo v podstate potvrdilo správnosť analytického výpočtu.
Poďakovanie
 Podporujeme výskumné aktivity na Slovensku/ Projekt je spolufinancovaný zo zdrojov EÚ. Tento článok bol vypracovaný v rámci projektu “Centrum excelentnosti integrovaného výskumu a využitia progresívnych materiálov a technológií v oblasti automobilovej elektroniky”, ITMS 26220120055. (100%)
Podporujeme výskumné aktivity na Slovensku/ Projekt je spolufinancovaný zo zdrojov EÚ. Tento článok bol vypracovaný v rámci projektu “Centrum excelentnosti integrovaného výskumu a využitia progresívnych materiálov a technológií v oblasti automobilovej elektroniky”, ITMS 26220120055. (100%)
Literatúra
- Materiály od firmy Portescap. Dostupné na internete:
http:// www.portescap.com - Aydin, M.- Huang, S.- Lipo, T. A: Axial flux permanent magnet disc machines: a review, University of Wisconsin – Madison, 2004
- Gieras J. F. – Wang R. J. – Kamper M. J.: Axial Flux Permanent Magnet Brushless Machines, Kluwer Academic Publisher, 2008
- Hrabovcová V. – Janoušek L. – Rafajdus P. – Ličko M.: Moderné elektrické stroje; University of Žilina press, 2001, Slovakia. (in Slovak)
- Hrabovcová V. – Rafajdus P. – Franko M.: Measuring and modeling of the electrical machines; University of Žilina press, 2004, Slovakia
- Kaňuch, J: Krokový motor s diskovým rotorom s axiálnym magnetickým tokom s krokom α<1°. Technical University of Kosice TUKE 2003
- Parviainen A.: Design of axial-flux permanent magnet low-speed machines and performance comparison between radial-flux and axial-flux machines. Lappeenrannan teknillinen yliopisto Digipaino 2005.
- Rahim N. A. – Hew W. P. – Mahmoudi A.: Axial-Flux Permanent-Magnet Brushless DC Traction Motor for Direct Drive of Electric Vehicle. International Review of Electrical Engineering (I.R.E.E.), Vol. 6, N. 2 March-April 2011
Spoluautoromčlánku je Doc. Ing. Želmíra Ferková, PhD., Katedra elektrotechniky a mechatroniky, Fakulta elektrotechniky a informatiky, Technická Univerzita v Košiciach.

