Spolupráca pohonných jednotiek v modernom automobile – Parallel Electric Assist Control Strategy (PEACS)
15. Júl, 2013, Autor článku: Matej Juraj, Elektrotechnika
Ročník 6, číslo 7  Pridať príspevok
Pridať príspevok
![]() Nasledujúci príspevok nadväzuje na predchádzajúci článok s názvom Simulácie a riadenie hybridného pohonu, ktorý sa zaoberá rôznymi typmi spolupráce medzi spaľovacím motorom a elektromotorom v hybridnom usporiadaní vozidla s parametrami VW Touareg Hybrid. V nasledujúcom príspevku je analyzovaná ďalšia možná stratégia riadenia pohonu Parallel Electric Assist Control Strategy a je vykonaná analýza jej vplyvu na spotrebu paliva počas totožného jazdného cyklu ako aj zhodnotenie všetkých troch analyzovaných spôsobov riadenia, Fuel Use Mode, Efficiency Mode a Parallel Electric Assist Mode.
Nasledujúci príspevok nadväzuje na predchádzajúci článok s názvom Simulácie a riadenie hybridného pohonu, ktorý sa zaoberá rôznymi typmi spolupráce medzi spaľovacím motorom a elektromotorom v hybridnom usporiadaní vozidla s parametrami VW Touareg Hybrid. V nasledujúcom príspevku je analyzovaná ďalšia možná stratégia riadenia pohonu Parallel Electric Assist Control Strategy a je vykonaná analýza jej vplyvu na spotrebu paliva počas totožného jazdného cyklu ako aj zhodnotenie všetkých troch analyzovaných spôsobov riadenia, Fuel Use Mode, Efficiency Mode a Parallel Electric Assist Mode.
Úvod
Riadiaca logika Parallel Electric Assist Control Strategy využíva elektromotor pri rozjazde vozidla alebo pri potrebe maximálneho zrýchlenia, teda pri potrebe maximálneho výkonu a v ostatných prípadoch na dobíjanie vysokonapäťového akumulátora. Elektromotor sa v tomto prípade riadenia využíva pri rozjazde vozidla alebo pri jazde minimálnou rýchlosťou. Elektromotor v generátorickom režime sa využíva, keď je moment produkovaný spaľovacím motorom vyšší ako je moment potrebný na jazdu konštantnou rýchlosťou. Ďalej, pri potrebe maximálnej akcelerácie, kde sa obidva výkony hnacích motorov a krútiace momenty pri daných otáčkach sčítajú (Režim BOOST). Hovoríme tomu maximálny kombinovaný výkon vozidla
Pri rekuperácií, kde za pomoci elektromotora pracujúceho v generátorickom režime sa mení kinetická energia vozidla na elektrickú energiu. Keď spaľovací motor pracuje s nízkou účinnosťou pri určitom krútiacom momente a daných otáčkach, riadiaca logika vypne spaľovací motor a potrebný krútiaci moment je produkovaný len elektromotorom. Pri nízkom stave nabitia batérií, elektromotor začne pracovať v generátorickom režime, dodatočne zaťaží spaľovací motor svojím brzdným momentom a produkovanú elektrickú energiu ukladá do vysokonapäťového akumulátora. Na obr. 1 môžeme vidieť blokovú schému simulačného modelu, ktorá je bližšie popísané v predošlom príspevku „Simulácia a riadenie hybridného pohonu“.
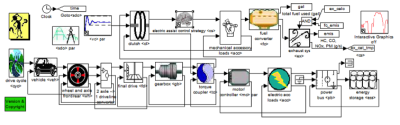
Obr.1 Bloková schéma PEACS
1. Parallel Electric Assist Control – PEACS
V predošlom príspevku „Simulácia a riadenie hybridného pohonu“ boli analyzované dve možné stratégie spolupráce medzi spaľovacím motorom a elektromotorom tzv. Fuel Use Mode a Efficiency Mode, ktoré pracujú na princípe fuzzy logiky. V tomto príspevku je analyzovaný ďalší možný spôsob riadenia hybridného pohonu, ktorý by sa dal aplikovať na vozidlo a hnacie motory zadaných parametrov, podľa VW Touareg Hybrid.
Na obr.2 vidíme pracovné body v ktorých pracuje spaľovací motor počas jazdného cyklu NEDC pri stratégií Parallel Electric Assist Control. Vidíme, že na rozdiel od fuzzy režimov (prezentované v minulom článku) sú tieto body rozmiestnené rovnomernejšie v oblasti 1 000 – 2 800 ot/min. Maximálny krútiaci moment produkovaný spaľovacím motorom je 230 Nm pri 2 800 ot/min. Na obr.3 vidíme pracovné body v ktorých pracuje elektromotor. Po väčšinu času jazdného cyklu elektromotor neprodukuje žiadny moment, čím nepriaznivo vplýva na účinnosť celého pohonného systému, pretože zväčšuje zotrvačný odpor rotujúcich častí mechanizmu, ak nie je elektromotor mechanicky odpojený spojkou od hnacieho mechanizmu.
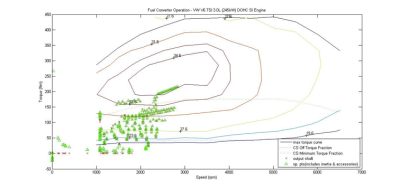
Obr.2 Pracovné body spaľovacieho motora 3,0 V6 TSI
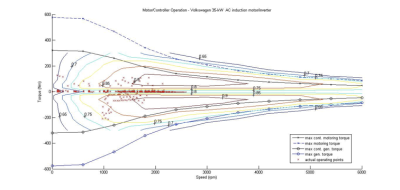
Obr.3 Pracovné body elektromotora
Obr.2 a 3 reprezentujú pracovné body hnacích motorov pri použití stratégie PEACS počas jazdného cyklu NEDC, ktorý je objasnený taktiež v predošlom príspevku „Simulácia a riadenie hybridného pohonu“. V charakteristikách spaľovacieho motora obr.2 a elektromotora obr.3 sú znázornené okrem pracovných bodov aj mapy celkových účinností s príslušnými hodnotami, z ktorých sa dá vyčítať efektivita využitia spaľovacieho motora a elektromotora počas zvoleného jazdného cyklu.
2. Výsledky simulácie PEACS
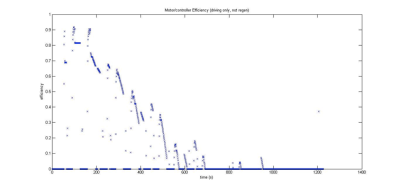
Nasledujúca kapitola analyzuje dosiahnuté výsledky zvolenej stratégia PEACS pri jazdnom cykle NEDC. Na nasledujúcich priebehoch môžeme vidieť hodnoty účinností spaľovacieho motora obr. 4 a elektromotora obr. 5 v závislosti od času jazdného cyklu. Jedná sa vlastne o transformáciu pracovných bodov spaľovacieho motora a elektromotora z obr. 2 a obr.3 z charakteristík hnacích motorov do časového vyjadrenia počas zvoleného jazdného cyklu NEDC.
Z obr.4 vyplýva, že maximálna účinnosť spaľovacieho motora dosahovaná počas jazdného cyklu je 33% a je dosahovaná počas mimomestskej časti jazdného cyklu. Jedná sa prakticky o hodnotu, ktorá je takmer na hranici celkovej maximálnej účinnosti spaľovacieho motora. Počas mestskej časti cyklu je dosahovaná maximálna účinnosť na hranici 30%, čo predstavuje pre spaľovací motora tiež vysokú hodnotu. Tieto vysoké účinnosti dosiahne spaľovací motor vhodnou asistenciou elektromotora/generátora počas jazdného cyklu. Maximálna účinnosť elektromotora, obr. 5, je 92% a je dosahovaná na začiatku jazdného cyklu, keď je pohon vozidla zabezpečovaný len elektrickým pohonom.
V ďalšom priebehu cyklu elektromotor pracuje väčšinou v generátorickom režime, kde rekuperuje kinetickú energiu na elektrickú a napomáha tak vhodne zaťažovať spaľovací motor, ktorý dokáže využívať vysoké hodnoty celkovej účinnosti. Na obr. 5 si môžeme všimnúť že v druhej polovici jazdného cyklu NEDC cca po 700 sekundách už elektromotor nie je v činnosti. Je to z toho dôvodu, že jazdný cyklus natoľko zaťažuje spaľovací motor, že takmer vôbec nepotrebuje asistenciu elektromotora a ako dokumentuje aj obr. 4 spaľovací motor pracuje vo vysokých hodnotách celkovej účinnosti.
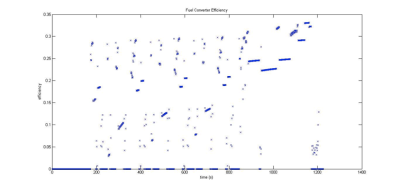
Obr.4 Priebeh účinnosti spaľovacieho motora počas jazdného cyklu
Obr.5 Priebeh účinnosti elektromotora počas jazdného cyklu
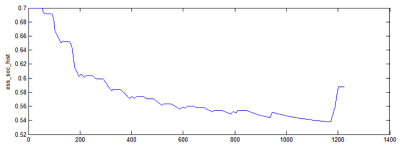
Na obr.6 vidíme priebeh vybíjania akumulátorov. Najväčší pokles je na začiatku cyklu keď je pohon zabezpečovaný elektrickým pohonom. A postupne sa znižuje až na hodnotu 54%. Vplyvom rekuperácie pri brzdení z rýchlosti 120 km/h na 0 km/h sa hodnota SoC ustáli na 59%. Obr.7 reprezentuje porovnanie priebehov krútiacich momentov spaľovacieho motora aj elektromotora. V prvej časti mestského cyklu ide vozidlo len na elektrický pohon, čím nespotrebováva žiadne palivo (viď obr.8). Po poklese stavu nabitia akumulátora (SoC), sa naštartuje spaľovací motor, ktorý produkuje krútiaci moment potrebný pre pohon vozidla a elektromotor slúži len na rekuperáciu energie.
Obr.6 Stav nabitia akumulátora (SOC) počas jazdného cyklu
Z obr. 6 a obr.7 je zrejmé, že na začiatku jazdného cyklu je dostatočne vysoké SOC na to, aby spaľovací motor nebol v činnosti a pohon vozidla zabezpečoval jedine elektromotor. Dokumentuje to aj obr. 8, z ktorého je zrejmé že spotreba paliva spaľovacieho motora je na začiatku jazdného cyklu nulová. Výsledné hodnoty spotreby paliva spaľovacieho motora sú tak veľmi závislé od počiatočného SOC akumulátorov ako aj od dĺžky a charakteru jazdného cyklu. Tým vznikajú veľké rozdiely v spotrebe paliva hybridných vozidiel udávaných výrobcom a v skutočnej prevádzke. Počas skutočnej prevádzky nemusíme vždy mať k dispozícií vysokú hodnotu SOC a takmer okamžite je potrebné zaťažovať spaľovací motor výkonom generátora. Spaľovací motor tak pracuje na vyšší výkon ako je potrebné na jazdu a jeho spotreba paliva sa zvýši paradoxne aj napriek zvýšeniu jeho využitia celkovej účinnosti.
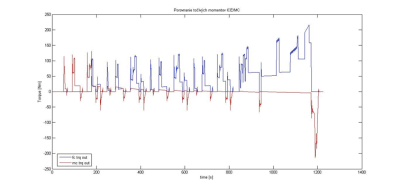
Obr.7 Priebeh produkovaného krútiaceho momentu elektromotora a spaľovacieho motora
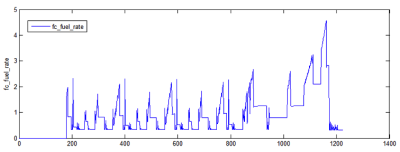
Obr.8 Spotreba paliva v g/s počas jazdného cyklu
3. Zhodnotenie výsledkov
Z teoreticky vytvorených predpokladov a výpočtov sme navrhli a vytvorili model hybridného vozidla VW Touareg, na ktorom sme následne simulovali jednotlivé riadiace logiky hybridného manažmentu. Porovnávali sme logiky: Fuel use mode, Efficieny mode a Parallel Electric Asistant Control Strategy. Všetky logiky sme testovali na jazdnom cykle NEDC a následne porovnali. Z hľadiska spotreby aj jazdnej dynamiky vyšla ako najvhodnejšia riadiaca logika pre vozidlo VW Touareg, logika Paraller Electric Asistant Control Strategy, kde na testovanom jazdnom cykle bola nasimulovaná spotreba paliva 12,2l/100km (Fuel Use mode: 12,3l/100km, Efficiency mode: 18,6l/100km).
Každá riadiaca logika má svoje výhody aj nevýhody a je určená pre svoju individuálnu oblasť využitia. Kombinovaná hodnota spotreby paliva udávaná výrobcom je výrazne nižšia (8,2l). Tento rozdiel môže byť spôsobený inými podmienkami merania akými bola prevedená simulácia, iný počiatočný stav SOC, iná hmotnosť a pod. Tieto počiatočné podmienky silno ovplyvnia celkovú spotrebu paliva na porovnávacom jazdnom cykle.
Tabuľka 1: Porovnanie riadiacich logík
| riadiaca logika | PEACS | FLC: Fuel use mode | FLC: Efficiency mode | VW data |
|---|---|---|---|---|
| priemerná spotreba paliva [l/100km] | 12,2 | 12,3 | 18,6 | 8,2 |
| max. rýchlosť [km/h] | 247,7 | 237,9 | 245,1 | 228 |
| 0 – 100 km/h [s] | 5,5 | 5,4 | 5,7 | 6,5 |
| 60 – 120 km/h [s] | 4,9 | 5,2 | 5 | - |
| 0 – 160 km/h [s] | 12,8 | 13,6 | 13,2 | - |
Poďakovanie
Príspevok bol spracovaný s podporou grantu z Nadácie Tatra banky v rámci grantového programu E-Talent pod číslom 2012et002, názov projektu ” Elektronický systém riadenia hybridnej zdrojovej sústavy” .
Literatúra
- Vnútropodnikové informácie Volkswagen Slovakia a.s.
- ADVISOR Documentation, ADVANCED VEHICLE SIMULATOR, National Renewable Energy Laboratory, October 10, 2003
Spoluautorom článku je Juraj Harmata

