Systémy LIDAR v automobiloch
29. September, 2014, Autor článku: Čarný Matúš, Elektrotechnika, Informačné technológie
Ročník 7, číslo 9  Pridať príspevok
Pridať príspevok
![]() Systém LIDAR je modernou formou senzorovej technológie, ktorá si našla svoje miesto v oblasti analýzy priestoru. Väčšina systémov aktívnej a pasívnej bezpečnosti potrebuje k svojej činnosti spoľahlivé informácie o priestore v okolí vozidla. Podrobné a spoľahlivé informácie o skenovanom priestore sú schopné poskytnúť práve systémy LIDAR. Článok sa zaoberá základnými fyzikálnymi a konštrukčnými princípmi systémov LIDAR a ich aplikáciám v moderných automobiloch.
Systém LIDAR je modernou formou senzorovej technológie, ktorá si našla svoje miesto v oblasti analýzy priestoru. Väčšina systémov aktívnej a pasívnej bezpečnosti potrebuje k svojej činnosti spoľahlivé informácie o priestore v okolí vozidla. Podrobné a spoľahlivé informácie o skenovanom priestore sú schopné poskytnúť práve systémy LIDAR. Článok sa zaoberá základnými fyzikálnymi a konštrukčnými princípmi systémov LIDAR a ich aplikáciám v moderných automobiloch.
Úvod
Všeobecné pomenovanie LIDAR znamená „Light Detection and Ranging“, aj keď pôvodný termín „LIDAR“ pochádza z anglických slov “light” a “radar”. Počiatky LIDAR-u sa kladú do roku 1970, v ktorom americká NASA (National Aeronautics and Space Administration) vyvinula funkčný systém LIDAR. Významnú úlohu splnil systém LIDAR v roku 1971 počas misie Apollo 15, keď použitím tejto technológie zmapovali povrch Mesiaca [1][2].
Pôvodnou funkciou systému LIDAR bolo skúmanie atmosféry, oceánov a polárnych ľadovcov. Napriek tomu, že sa systém LIDAR ukázal ako presný a spoľahlivý, využitie si našiel prevažne vo vedeckých kruhoch. V polovici deväťdesiatych rokov, keď sa na trh dostalo moderné a presné GPS zariadene s dostatočným pokrytím, prišiel na trh aj moderný systém LIDAR pre komerčných zákazníkov, ktorý bol určený na mapovanie terénu. Systém LIDAR nachádza v súčasnosti uplatnenie v mnohých priemyselných odvetviach a vedných disciplínach, napr. diaľkový prieskum povrchu, seizmológia, skúmanie atmosféry Zeme, geológia, archeológia, baníctvo a pod., pričom údaje získané LIDARom je možné využiť vo veľkom množstve aplikácií ako napr. výstavbe infraštruktúry (cesty, železnice a letiská), linkovej výstavbe (elektrické vedenia, plynovody, ropovody), analýze ťažby nerastných surovín, ale aj bezpečnostných prvkoch v automobiloch a pod. [2][3][4].
Princíp činnosti LIDAR
Systém LIDAR využíva ultrafialové, viditeľné alebo infračervené svetlo. Časť svetla, ktoré dopadne na mapovaný objekt, je pohltená a istá časť tohto svetla je odrazená späť a to v závislosti od zloženia daného objektu a zloženia prostredia. Konštrukcia systému LIDAR sa môže líšiť od danej aplikácie, vo všeobecnosti ale pozostáva zo štyroch základných častí: laser vo funkcii vysielača (s vlnovou dĺžkou typicky od 400 do 1 300 nm), skenera s prídavnou optikou, fotodetektora s prídavnou elektronikou (vo funkcii prijímača) a navigačného a polohového systému (GPS, INS) [5]. Základnou časťou každého systému LIDAR je laser. V systémoch LIDAR je často používaný tuholátkový Nd:YAG (Ytrium Aluminium Garnet) laser. Pre aplikáciu v automobilovom priemysle je použivaný aj polovodičový laser.
Rýchlosť získania skenovaného obrazu objektu je závislá od rýchlosti naskenovania snímky pomocou optického systému. Najbežnejšie typy skenovacích zariadení používaných systémom LIDAR sú znázornené na Obr. 1. Väčšina laserových skenerov využíva pohyblivé zrkadlá, ktoré slúžia na vychyľovanie laserového lúča do požadovaného smeru. Riadenie lúča môže byť jednosmerné alebo dvojrozmerné. Pre niektoré typy aplikácií, systému LIDAR sú ale výhodnejšie alternatívne spôsoby vychyľovania ako napríklad využitie rotačného zrkadla tvaru polygónu, využitie Palmerovho skenera alebo použitie fixného optického skenera [6].
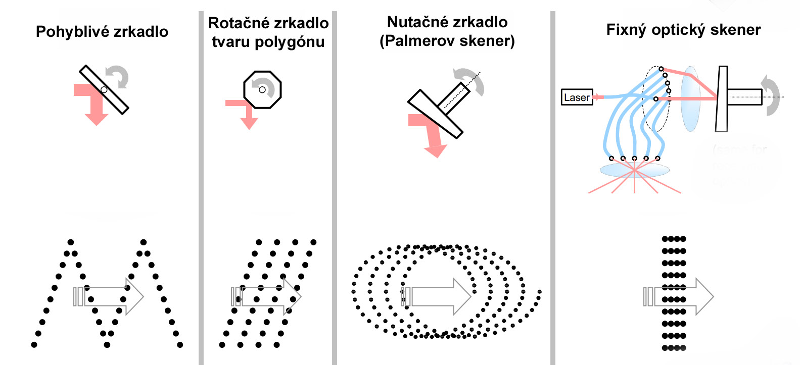
Obr. 1 Najbežnejšie typy skenovacích zariadení používaných systémom LIDAR [7]
Fotodetektor slúži na detekciu elektromagnetického žiarenia. V prípade systému LIDAR ide o detegovanie odrazeného, resp. rozptýleného svetla. Použitie fotodetektorov sa líši v závislosti od požiadaviek na presnosť, rozlišovaciu schopnosť či rýchlosť detekcie elektromagnetického žiarenia. Na Obr. 2 je znázornený proces spracovania signálov systémom LIDAR. Pri dopade fotónov na fotodetektor, ktorý je v tomto prípade reprezentovaný lavínovou fotodiódou APD (Avalanche photodiode), vzniká prúdový signál zodpovedajúci dopadajúcemu žiareniu. Tento signál je potom privedený na transimpedančný zosilňovač, kde je uskutočnený prevod prúdového signálu na napäťový. V ďalšom kroku je signál zosilnený diferenciálnym zosilňovačom a prevedený do digitálnej podoby analógovo-digitálnym prevodníkom. Takto spracovaný signál je následne vyhodnocovaný číslicovým obvodom FPGA (Field Programmable Gate Array) [8].
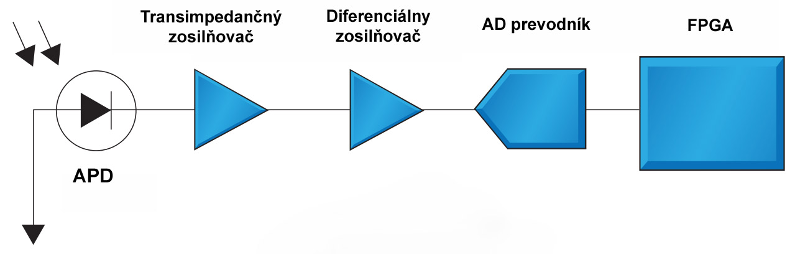
Obr. 2 Spracovanie a digitalizácia signálu pri real-time vizualizácii [8]
Navigačný a polohový systém zohráva významnú úlohu v prípade, ak je systém LIDAR umiestnený na mobilnom zariadení. Systém LIDAR využíva informácie o polohe, aby mohol následne vytvoriť skutočný model prostredia. Navigačný a polohový systém je nevyhnutnou súčasťou systémov LIDAR určených na topografické mapovanie terénu. Najbežnejšie navigačné a polohové subsystémy využívané v systéme LIDAR-u sú globálny lokalizačný systém GPS (Global Positioning System), ktorý poskytuje presné geografické údaje o polohe a inerciálny navigačný systém INS (Inertial Navigation System), ktorého úlohu je určovať orientáciu respektíve natočenie. Pri aplikáciách systému LIDAR v automobilovom priemysle nie sú tieto navigačné a polohové systémy primárne nevyhnutné, no výrazne rozširujú jeho aplikačné možnosti [9][11].
Na Obr. 3 je základná schéma systému LIDAR. Laser (vysielač) generuje pulzujúce alebo kontinuálne svetlo, ktoré dopadá na pozorovaný objekt. Časť svetla, ktoré sa od pozorovaného objektu odrazí, bude rozptýlené a zachytené teleskopickým zrkadlom. Teleskopické zrkadlo je konštruované tak, aby sa dopadajúce svetlo odrazilo do svetlovodu, ktorý cez filter vedie svetelné lúče na detektor. Úlohou detektora je vyhodnotiť informácie a vytvoriť dátové súbory vhodné na ďalšie spracovanie [12].
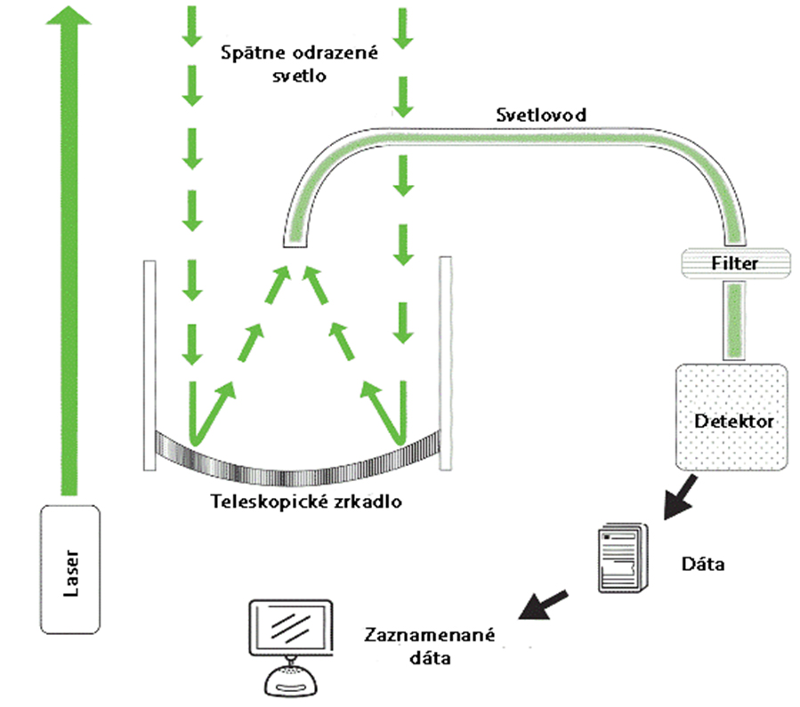
Obr. 3 Základná schéma systému LIDAR [12]
Fyzikálny princíp LIDAR-u je podobný elektromagnetickým meračom vzdialenosti, pri ktorých je laserové svetlo vysielané pomocou vysielača a energia odrazená od predmetu v prostredí (reflektora) je následne zachytená prijímačom. Pomocou času t, ktorý predstavuje čas, za ktorý laserové svetlo opustí vysielač, odrazí sa od reflektora a vráti sa na prijímač, je určená vzdialenosť medzi vysielačom a reflektorom. Čas šírenia žiarenia predstavuje nepriamu, ale základnú informáciou o polohe objektu (reflektora) [13]. Rýchlosť svetla v prostredí je možné vypočítať zo vzťahu:
 |
(1) |
kde cph je rýchlosť svetla v danom prostredí, c je rýchlosť svetla vo vákuu, n je absolútny index lomu, λ je vlnová dĺžka a f je frekvencia elektromagnetických vĺn. Vzdialenosti pozorovaného objektu je potom možné vypočítať zo vzťahu:
 |
(2) |
kde t je čas od opustenia fotónu zo zdroja do jeho dopadu do fotodetektora. Systém LIDAR je schopný vysielať k pozorovanému objektu impulzy laserového svetla s frekvenciou až do 150 impulzov na milisekundu a vzhľadom na konštantnú rýchlosť svetla v danom prostredí dokáže určiť vzdialenosť medzi prístrojom a pozorovaným objektom s vysokou presnosťou. Absolútna presnosť LIDAR-u pri frekvencii 150 impulzov za milisekundu je cca 15 cm. Opakovaním tohto procesu v istom časovom slede dokáže prístroj vytvoriť mapu meraného objektu vzhľadom na vysielač. V prípade, že je samotný prístroj umiestnený na mobilnom zariadení, musia byť tieto informácie doplnené o zmenu výšky prípadne polohy prístroja vzhľadom na skenovaný objekt, aby boli výstupné údaje korektné [13].
Súčasné systémy LIDAR používajú pri spracovaní odrazeného elektromagnetického žiarenia detekciu viacnásobných odrazov. Spracovanie viacerých alebo dokonca všetkých odrazov jednej emisie umožňuje využitie LIDAR-u v špecifických aplikáciách. Príkladom viacnásobnej detekcie je skenovanie stromu, ako je uvedené na Obr. 4. V prípade skenovania stromu, by sa časť lúča odrazila od prvej vetvy, ďalšia časť od druhej vetvy a posledná časť lúča by sa odrazila od zeme. V prípade použitia stratégie detekcie len prvého odrazeného elektromagnetického žiarenia by vizualizačný systém LIDAR-u zaznamenal objekt vo výške prvej vetvy. Ak by bola použitá stratégia viacnásobnej detekcie všetkých odrazených lúčov elektromagnetického žiarenia, vizualizačný systém by bol schopný spracovať presnejší model stromu (od zeme až po poslednú vetvu) [6][7].
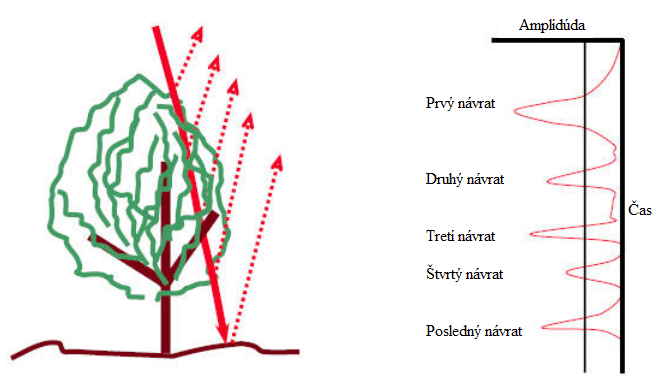
Obr. 4 Príklad viacnásobného odrazu [6]
Ďalším dôležitým parametrom snímaného prostredia, ktorý je možné pri spracovaní dát zo systému LIDAR použiť, je koeficient (činiteľ) odrazu. Svetelné žiarenie, ktoré dopadne na svetelne činnú látku sa môže od danej látky odraziť, pohltiť alebo žiarenie prestúpi touto látkou. Dopadajúci svetelný tok φ je súčtom čiastkových svetelných tokov:
 |
(3) |
kde φρ je odrazený svetelný tok, φτ je svetelný tok, ktorý prešiel povrchom látky a φα je svetelný tok pohltený látkou. Na základe spomenutej energetickej bilancie sú definované svetelné koeficienty a to činiteľ odrazu svetla ρ, činiteľ prechodu svetla τ a činiteľ pohltenosti svetla α ako [14]:
 |
(4) |
Činiteľ odrazu svetla je v prípade systému LIDAR nosným parameterom pre posudzovanie kvality odrazeného infračerveného svetelného lúča od daného rozhrania dvoch materiálov. Predpokladajme, že prostredie so zdrojom svetla (vysielačom) je vzduch. Uvažujeme rozhranie vzduch/materiál reflektora. Podľa spomínaných svetelných zákonov sa pri dopade infračerveného svetelného lúča na toto rozhranie istá časť svetelného toku odrazí späť do daného prostredia. Absolútny index lomu cieľového prostredia je teda parameter úmerný odrazenému svetelnému toku.
Po spracovaní všetkých údajov z detekčných systémov LIDAR-u vzniká súbor bodov (point cloud), ktoré predstavujú nespracovaný obraz. Body sú definované len podľa svojej vzájomnej polohy a podľa polohy vzhľadom na systém LIDAR v čase skenovania. Takto zaznamenané, spracované a spätne odrazené signály, sú vhodné na integráciu do 3D modelu [9].
LIDAR systémy pre automobily
Pri aplikácii systému LIDAR do automobilového priemyslu začali vznikať nové požiadavky na tento systém. Aplikácie v automobilovom priemysle nevyžadujú dokonalý model krajiny či vegetácie, ale spoľahlivé rozpoznanie prekážky a spracovanie údajov v reálnom čase. Po splnení týchto požiadaviek dokáže riadiaci systém automobilu adekvátne reagovať na prípadnú prekážku. Najčastejšie sa v súvislosti so systémom LIDAR hovorí o zdokonalení bezpečnostných prvkov a zvýšení jazdného komfortu [15]. Ako všetky typy optických systémov aj LIDAR má isté zníženie účinnosti pri nepriaznivých podmienkach ako je napríklad hmla. Tento problém je ale možné minimalizovať použitím vhodnej vlnovej dĺžky. Optimálna voľba vlnovej dĺžky sa pohybuje v rozmedzí 600 až 1000 nm. Hlavnými kritériami pre voľbu vlnovej dĺžky sú činiteľ odrazu svetla typických materiálov a cena systému [16].
Priame použitie systému LIDAR v automobilovom priemysle sa najčastejšie spája s autonómnymi systémami, ktoré dokážu samé rozpoznať situáciu a následne reagovať. Automobily využívajúce túto technológiu majú spravidla viac zariadení, ktoré snímajú okolie, ako napríklad kamery, senzory a iné video systémy. Počítačové systémy následne analyzujú všetky získané dáta. Je potrebné poznamenať, že v prípade ak LIDAR pracuje samostatne, jeho účinnosť podstatne klesá. Pre aplikácie v automobilovom priemysle je teda pravidlom používať systém LIDAR v spolupráci s inými kamerovými a radarovými systémami za použitia špeciálneho hardwaru a softwaru [17].
Pri spracovaní získaných údajov je dôležitý algoritmus, ktorý transformuje výstupné dáta z LIDAR-u do konečného 3D výstupu v reálnom čase. Tento algoritmus pozostáva z niekoľkých krokov. V prvom kroku sú dáta jedného laserového pulzu prevedené do karteziánskej sústavy. Následne sú vytvorené body, nazvané voxely, s príslušnými súradnicami (x, y, z) v priestore záujmu (v okolí vozidla). Voxely sú od seba v priestore vzdialené cca 25 mm ale ich vzdialenosť sa samozrejme pohybuje v závislosti od daného systému a požiadavok pre ich ďalšie využitie. Vytvorené voxely vytvoria sieť bodov v priestore. Využitie takto „riedkej“ štruktúry spôsobuje výrazne zníženie počtu dát a súčasne zrýchlenie spracovania. V priebehu merania zostáva väčšina voxelov prázdna a teda v priestore týchto bodov sa nenachádza žiaden predmet (prekážka). Po spracovaní určitého počtu laserových impulzov (cca 4000) je z aktívnych voxelov (nesúcich informáciu o predmete/prekážke) vytvorený 3D obraz. Vizualizačný systém následne začne čistiť miesta (voxely), ktoré vyhodnotí ako náhodne zachytené (chyby) [18][19].
V ďalšom kroku je v priestore záujmu vyhľadaný najnižší bod, ktorý reprezentuje povrch. Poloha povrchu predstavuje základnú referenčnú vrstvu a je analyzovaná na základe najnižšej súradnice osi z. Aj v priebehu tohto kroku nastane čiastočné vyčistenie súboru bodov. Pri použití systému LIDAR na pohyblivom vozidle je potrebné, aby systém pracoval v kombinácii z GPS a INS a spravil príslušné korekcie. Následne systém LIDAR koriguje časové odozvy fotodetektorov. V prípade ideálnej odozvy fotodetektorov by mali všetky detegované rozptylové plochy (prekážky) nekonečne hladký povrch. V skutočnosti ale odozvy od APD detektorov vykazujú pomalý rozklad. Napäťový signál, ktorý APD detektor generuje, najskôr rýchlo narastá a následne pomalšie klesá, čo spôsobuje vo výslednom 3D obraze takzvané „chvosty“. Môže sa zdať, že prítomnosť „chvostov“ predstavuje vážny problém pri generovaní potrebného 3D obrazu. V skutočnosti ale práve takéto chvosty dokážu označiť objekty záujmu v danom priestore, nakoľko v prípade náhodne generovaného signálu (šumu) sa takéto chvosty nevytvárajú [18][19].
Okrem systému LIDAR využíva mnoho moderných automobilov aj klasické radarové systémy. Aj napriek tomu, že LIDAR dokáže merať vo väčších rozsahoch, na väčšie vzdialenosti a oveľa lepšie reaguje pri nepriaznivých podmienkach, klasický radarový systém dokáže poskytnúť podrobnejšie informácie o rýchlosti vďaka Dopplerovmu javu. Aby systém LIDAR analyzoval rýchlosť pozorovaného objektu, potrebuje niekoľko informácií. Systém LIDAR potrebuje dva údaje vzdialenosti objektu vzhľadom na polohu detektora v dvoch časových okamihoch. Ďalšou informáciou je poloha pozorovaného objektu vzhľadom na detektor, ktorá je najčastejšie určená spoluprácou systému LIDAR s GPS a INS. Následne môže tieto informácie použiť na výpočet rýchlosti pozorovaného objektu. Radar na rozdiel od LIDAR-u využíva Dopplerov jav, čo predstavuje zmenu vlnovej dĺžky (a teda frekvencie) elektromagnetických vĺn vyvolanú relatívnym pohybom zdroja (objektu) a pozorovateľa (radaru). Meranie rýchlosti použitím radaru je teda jednoduchšie, presnejšie a rýchlejšie.
Medzi ďalšie dôležité aplikácie LIDAR systémov patri napr. kontrola slepého uhla, adaptívny tempomat či systémy Collision Warning a Collision Avoidance. V budúcnosti je možné LIDAR systémy očakávať v automatických diaľničných systémoch AHS (Automated Highway System) alebo autonómnych vozidlách.
Záver
Použitie systému LIDAR v automobilovom priemysle z roka na rok rastie. Najväčšie uplatnenie si systém LIDAR našiel v systémoch aktívnej a pasívnej bezpečnosti. Výsledkom spolupráce systému LIDAR s ďalšími senzorovými prvkami a systémami riadenia sú komplexné autonómne systémy. Cieľom mnohých vývojárov je v budúcnosti vytvoriť plne autonómne vozidlo, ktoré bude mať vysoko spoľahlivú prevádzku.
Použitá literatúra
- LIDAR-UK, Bluesky International Limited, Online:
http://www.lidar-uk.com/ - Course Outline – Lidar: History of Lidar Development. Geography, College of Earth and Mineral Sciences, Online:
https://www.e-education.psu.edu/lidar/l1_p4.html - Carter, J. – Schmid, K. – Waters, K. – Betzhold, L. – Hadley, B. – Mataosky, R. – Halleran, J.: “Lidar 101: An Introduction to Lidar Technology, Data, and Applications.” National Oceanic and Atmospheric Administration (NOAA) Coastal Services Center. November 2012. Revised. Charleston, SC: NOAA Coastal Services Center
- Liadsky, J.: Introduction to LIDAR. Optech Incorporated, NPS Lidar Workshop, May 24, 2007. Online:
http://www.nps.edu/Academics/Centers/RSC/documents/IntroductiontoLIDAR.pdf - Kmeťová, Z.: LiDAR a možnosti jeho využitia, Online:
http://www.forestportal.sk/SitePages/projekt/lidar_technologia.aspx - Tamás, L.: Data acquisition and integration. Land Surveying, Geodetics, Cartography. Online:
http://www.tankonyvtar.hu/hu/tartalom/tamop425/0027_DAI4/ch01s02.html - Claus, B. – Vosselman, G. – Sithole, G.: Aerial laser Scanning. International Summer School : “Digital Recording and 3D Modeling”, Aghios Nikolaos, Crete, Greece, 24-29 April 2006.
- LIDAR System Design for Automotive, Industrial, Military Applications. Texas Instrumentals 2011. Online:
http://www.ti.com/lit/an/snaa123/snaa123.pdf - Tencer, T.: LIDAR, Pořizování 3D dat. , Študijiné materiály 2012. Online:
https://is.muni.cz/el/1421/podzim2012/AEA_73/Tencer_-_LiDAR_-_Porizovani_3D_dat.pdf - Gohring, D. – Wang, M. – Schnurmacher, M. – Ganjineh, T.: Radar/Lidar Sensor Fusion for Car-Following on Highways. Automation, Robotics and Applications (ICARA), 2011 5th International Conference on, p. 407 – 412.
- Young, J.: Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration. Online:
https://cloud.sdsc.edu/v1/AUTH_opentopography/www/shortcourses/US-Egypt12/Young_airborne_fundamentals_final.pdf - Light Detection and Ranging (LIDAR), Earth System Research Laboratory. Online:
http://www.esrl.noaa.gov/gmd/obop/mlo/programs/gmdlidar/general_info.html - Lemmens, M.: Airborne LiDAR Sensor: Product Survey. GIM International, 2007
- Horňák, P.: Svetelná technika, Alfa, vydavateľstvo technickej a ekonomicej literatúry Bratislava, (1989)
- Dimitry, K. – Shiniko, C. – Yuri, O.: On Real-Time LIDAR Data Segmentation and Classification. Robotics and Automation (ICRA), 2011 IEEE International Conference on; 06/2011. Online:
http://worldcomp-proceedings.com/proc/p2013/IPC2940.pdf - Cho, P. – Anderson, H. – Hatch, R – Ramaswami, P.: Real-TIme 3D Ladar Imanging. Lincoln Laboratory Journal, Vol. 16, No. 1, 2006. Online:
http://www.ll.mit.edu/publications/journal/pdf/vol16_no1/16_1_8Cho.pdf - Behrens, P.: LIDAR for Automotive Applications. Online:
http://www.sensortest.de/ausstellerbereich/upload/mnpdf/en/120213_Lidar_for_automotive_12.pdf - Sanders, N. – Gartley, M. – Goodenough, A. – Raqueno, R. – Brown, S.: Digital Imaging and Remote Sensing Image Generation (DIRSIG), Online:
http://dirsig.blogspot.sk/2010/11/lidar-point-cloud-visualization.html
Spoluautorom článku je Igor Vehec

