Systém pre evidenciu zvislých dopravných značiek s využitím optického korelátora
12. November, 2014, Autor článku: Solus David, Informačné technológie
Ročník 7, číslo 11  Pridať príspevok
Pridať príspevok
![]() Obsahom tohto dokumentu je návrh systému pre evidenciu zvislých dopravných značiek. V navrhnutom evidenčnom systéme je využitý Cambridge optický korelátor. V súčasnej dobe má evidenčný systém dopravného značenia široké uplatnenie v rámci kontroly dopravných značiek, ktorých počet každoročne narastá. Využitím technológie optického spracovania sa zvýši rýchlosť spracovania veľkého množstva dát.
Obsahom tohto dokumentu je návrh systému pre evidenciu zvislých dopravných značiek. V navrhnutom evidenčnom systéme je využitý Cambridge optický korelátor. V súčasnej dobe má evidenčný systém dopravného značenia široké uplatnenie v rámci kontroly dopravných značiek, ktorých počet každoročne narastá. Využitím technológie optického spracovania sa zvýši rýchlosť spracovania veľkého množstva dát.
Úvod
V súčasnej dobe plnej technického pokroku sa veľký dôraz kladie na vývoj bezpečnostných systémov ako sú videodohľadové či videokontrólne systémy. Tieto systémy sa rozšírili aj do dopravného priemyslu, kde zvyšujú bezpečnosť či komfort vodiča a pasažierov. Dané systémy spracovávajú v reálnom čase veľké množstvá dát, preto rýchlosť spracovania je veľmi dôležitá. Do popredia sa dostávajú optické systémy, ktoré dokážu spracovať množstvo dát vo veľmi krátkom čase. Medzi takéto systémy patrí aj Cambridge optický korelátor, ktorý bol navrhnutý hlavne na porovnávanie a identifikáciu obrazov na základe ich podobnosti.
V prvej kapitole je opísaný princíp korelácie, Fourierova transformácia, ako aj optická Fourierova transformácia. Druhá kapitola obsahuje návrh inventarizačného systému zvislých dopravných značiek pomocou Cambridge optického korelátora. Tretia kapitola obsahuje popis vytvoreného systému, ktorý je vypracovaný pomocou programového jazyka C#. Experimenty sú súčasťou štvrtej kapitoly. Záverečná časť obsahuje vyhodnotenie navrhnutého evidenčného systému.
1. Optická korelácia
Všeobecným cieľom optickej korelácie je využitie jedinečných priestorových filtračných vlastností optických systémov na analógový výpočet podobnosti dvoch obrazov. Táto matematická operácia je základným nástrojom pre riešenie mnohých problémov pri spracovaní a rozpoznávaní obrazu.
1.1. Princíp korelácie
Pod pojmom korelácia rozumieme vzájomný vzťah, vzájomnú súvislosť, alebo väzbu medzi jednotlivými signálmi alebo funkciami. Korelácia dvoch signálov znamená všeobecne stupeň alebo mieru zhodnosti alebo podobnosti týchto signálov. Pojem korelácia sa niekedy používa pre jednoduchšie vyjadrenie pojmu korelačná funkcia. Korelácia môže byť analógová alebo diskrétna. S pojmom korelácia úzko súvisí pojem konvolúcia. Matematické vyjadrenie korelácie je formálne veľmi podobné vyjadreniu konvolúcie (niekedy identické), avšak ich fyzikálna podstata je úplne iná. Pri korelácií dvoch funkcií je oblasť prekrytia tvorená integráciou, avšak bez priestorového obrátenia ako v prípade konvolúcie [1]. Medzi funkciami f(x) a h(x) je korelácia definovaná nasledovne:
=f(x) \otimes h(x) = \int_{\infty}^{\infty} f(s) h^*(s-x)ds") |
(1) |
kde h* (x) je komplexne združené ku h(x). Táto operácia je znázornená na Obr. 1 pre dve jednoduché funkcie.
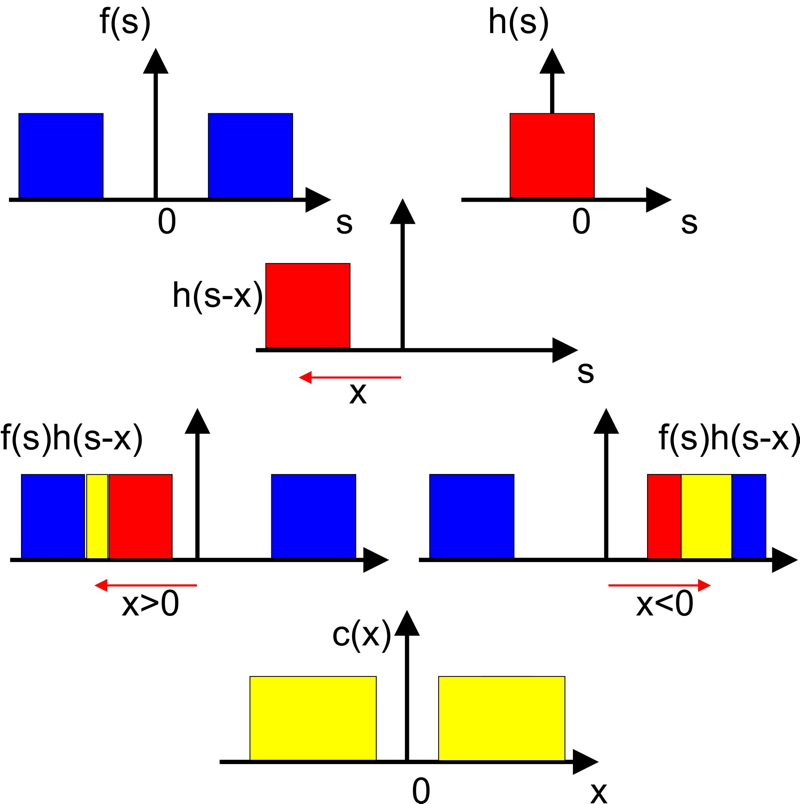
Obr. 1 Korelácia dvoch jednoduchých funkcií
Ak budeme považovať f(x) za signál a h(x) za cieľ, tak môžeme vidieť, že v mieste, kde sa dané signály zhodujú, vznikne korelačná špička. To poskytuje základ jednoduchého spôsobu detekcie cieľa. Korelácia sa využíva na charakterizovanie vlastností nekoherentných optických systémov v optike a na vyjadrenie miery zhodnosti dvoch obrazov v digitálnom zobrazení [2].
1.2. Fourierova transformácia
Fourierova transformácia je matematická metóda, ktorá je úspešne použiteľná na analyzovanie obrazu (signálu). Vo všeobecnom prípade ide o vyjadrenie funkcie popisujúcu obraz na inom základe. V špeciálnom prípade sa uvažuje tzv. trigonometrická Fourierova transformácia, kde sa za základ funkcie považuje sin(kt), cos(kt), alebo v komplexnom tvare exp(ikt). V prípade Fourierovho radu k je celé číslo, v prípade Fourierovej transformácie je reálna premenná. Výraz pre Fourierovu transformáciu môžeme odvodiť z Fourierovho radu prevedením limitného procesu T1→∞, teda zvolením nekonečnej doby periódy, čím umožníme využitie tejto metódy aj pre signály, ktoré nie sú periodické [3].
1.3. Optická Fourierova transformácia
Amplitúda svetelnej vlny, ktorá vychádza zo zobrazovaného predmetu sa rozkladá na priestorové harmonické zložky. Každá z týchto zložiek potom prechádza zobrazovacími optickými prvkami nezávisle, teda možno tieto komponenty individuálne spracovávať, prípadne úplne odstrániť zo zobrazujúceho zväzku a tým riadene ovplyvňovať výsledný obraz. Je dôležité si uvedomiť, že každému bodu vo Fourierovej rovine zodpovedá jedna priestorová frekvencia.
Optická Fourierova transformácia opisuje šírenie svetelných vĺn na základe harmonickej analýzy (Fourierovej transformácie) a lineárnych systémov. Harmonická analýza je založená na rozvoji ľubovoľné funkcie času f(t) v superpozícii (suma alebo integrál) harmonických funkcií času v rôznych frekvenciách, počiatočných fázach a amplitúdach. Základným stavebným kameňom tejto teórie je harmonická funkcia F(f)exp(j2πft) s frekvenciou f a amplitúdou F(f). Niekoľko takých funkcií je použitých na vytvorenie funkcie f(t) (Obr. 2). Priestorovú funkciu f(x,y) možno tiež rozložiť na rad jednoduchých priestorových funkcií. Keďže je možná táto superpozícia, môže byť aj ľubovoľná postupná vlna U(x,y,z) vyjadrená ako súčet rovinných vĺn, čo možno považovať za podstatu optickej Fourierovej transformácie [4].

Obr. 2 Rozloženie funkcie na rad jednoduchých funkcií
Aby sme lepšie pochopili princíp optickej Fourierovej transformácie si musíme uvedomiť, že aj obyčajná šošovka môže v reálnom čase realizovať Fourierovu transformáciu. Umiestnime obraz (snímku), do ohniskovej vzdialenosti šošovky a necháme ho osvetliť koherentným svetlom akým je napríklad laserový lúč. Nepriehľadné sklo umiestnime do ohniska druhej šošovky. Na vstupnom obraze šošovka automaticky vykoná Fourierovu transformáciu a výstup zobrazí na nepriehľadnom skle. Ak na vstup umiestnime sínusovú mriežku, ako je zobrazené na Obr. 3, výstupný obraz bude obsahovať škvrnu, ktorá bude situovaná v strede a bude reprezentovať DC zložku. Taktiež bude obsahovať vrcholy, ktoré sa budú v závislosti od frekvencie sínusoidy vzďaľovať od stredu.

Obr. 3 Optická Fourierova transformácia
Obr. 4 znázorňuje holistický princíp optickej Fourierovej transformácie. Keďže sa vstupný obraz nachádza v ohnisku šošovky, každý jeden bod bude šíriť kužeľovité lúče smerom k šošovke. Paralelný lúč, do ktorého sa lámu tieto lúče, osvetľuje celkový obraz na nepriehľadnom skle. V podstate sa bude každý bod vstupu rovnomerne šíriť cez Fourierov obraz, kde budú konštruktívne a deštruktívne interferencie produkovať korektné Fourierovo zobrazenie (Obr. 4 (a)). Naopak, paralelné lúče vstupného obrazu sú koncentrované v jednom centrálnom bode Fourierovho obrazu, kde sa priemerným jasom definuje centrálna DC zložka vstupného obrazu.
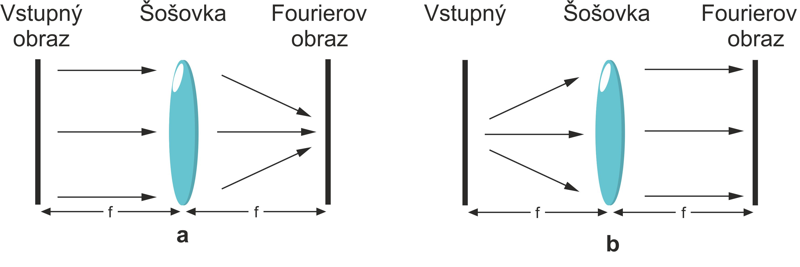
Obr. 4 Priama (a) a spätná (b) Fourierova transformácia
Optická Fourierova transformácia pracuje aj v opačnom smere (Obr. 4 (b)), kde sa pomocou spätnej Fourierovej transformácie konvertuje Fourierovo zobrazenie späť do priestorového jasového obrazu. Matematicky je priama transformácia takmer zhodná so spätnou transformáciu, avšak jediný rozdiel je v znamienku mínus, ktoré obracia smer výpočtu [5].
2. Návrh inventarizačného systému dopravných značiek
Úlohou navrhnutého systému pre evidenciu zvislých dopravných značiek s využitím optického korelátora typu Cambridge je detekcia dopravnej značky zo vstupnej scény na základe GPS súradníc (Global Positioning System) a jej následné porovnanie s experimentálnou databázou referenčných dopravných značiek. Na porovnávanie jednotlivých dopravných značiek je použití Cambridge optický korelátor. Navrhnutý inventarizačný systém zvislých dopravných značiek pozostáva z troch základných funkčných blokov. Každý jeden blok plní svoju špecifickú úlohu. Základná bloková schéma navrhnutého systému je znázornená na Obr. 5

Obr. 5 Základná bloková schéma
Prvým blokom je kamera, ktorá obsahuje modul GPS. Jej úlohou je vytvorenie videozáznamu (vstupnej scény). Druhým blokom je počítač. Je to centrálne zariadenie, ktoré prijíma údaje z prvého bloku a obojsmerne komunikuje s posledným blokom – Cambridge optický korelátor. Počítač obsahuje ďalšie dva funkčné podbloky. Prvým je spracovanie vstupnej scény, ktorý spracováva informácie získané kamerou. Tieto spracované údaje posiela do bloku Cambridge optického korelátora. Druhým podblokom je vyhodnotenie údajov, ktorý vyhodnocuje údaje získané blokom CC, ktorý sa využíva na porovnávanie dopravných značiek. Na Obr. 6 je znázornená podrobná schéma navrhnutého systému.
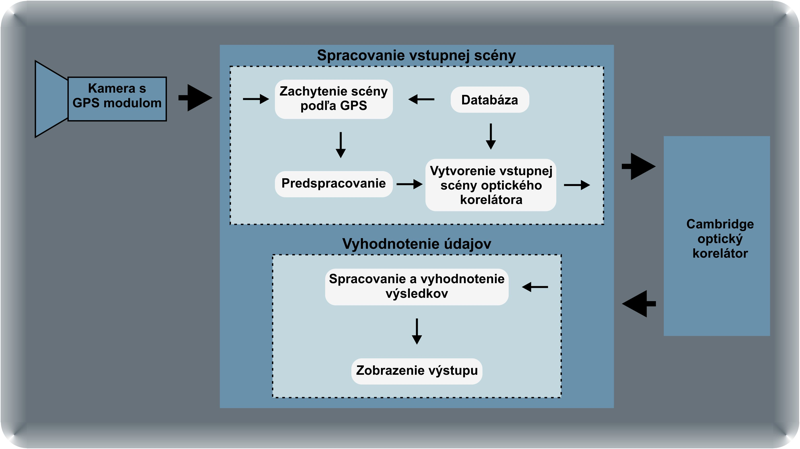
Obr. 6 Podrobná bloková schéma navrhnutého systému
2.1. Kamera GPS modulom
Kamera obsahujúca GPS modul je vstupné zariadenie navrhnutého systému. Na zachytenie vstupnej scény bola použitá kamera do auta HD DVR R300, ktorá bola nainštalovaná vo vozidle. Dané zariadenie obsahuje dve kamery, kde predná kamera zachytáva scénu pred sebou (cesta) a zadná kamera zachytáva interiér vozidla. V našom prípade máme zapnuté len snímanie prednou kamerou. Daná kamera obsahuje GPS modul, ktorý generuje GPS súradnice a zaznamenáva ich do XML súboru.
2.2. Spracovanie vstupnej scény
Spracovanie vstupnej scény zahrňuje štyri bloky. Prvým je databáza, ktorá obsahuje referenčné dopravné značky spolu aj s informáciou o ich polohe (GPS súradnice). Druhým blokom je zachytenie vstupnej scény podľa GPS súradníc. Ako bolo uvedené, kamera s GPS modulom generuje XML súbor, ktorý obsahuje GPS súradnice. Dané súradnice sa porovnávajú s GPS súradnicami jednotlivých referenčných dopravných značiek, ktoré sú uložené v databáze. V prípade zhody sa vstupná scéna zachytí štyrikrát podľa nastaveného časového intervalu, a tým získame štyri snímky, ktoré prejdú podblokom predspracovania a referenčná dopravná značka putuje do posledného podbloku – vytvorenie vstupnej scény optického korelátora. Úlohou bloku predspracovania je predspracovanie zachytenej scény, čo znamená úpravu scény tak, aby bolo z nej jednoduchšie získať potrebné informácie. Proces predspracovania scény pozostáva z piatich podblokov. Na Obr.7 je znázornená jeho bloková schéma.
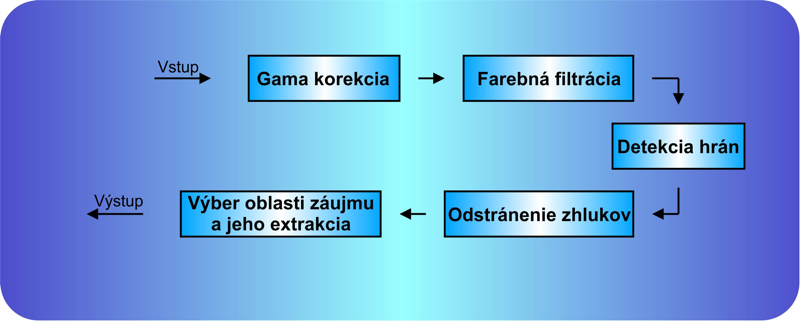
Obr. 7 Schéma bloku predspracovania
I. Gama korekcia
V tomto podbloku sa menia niektoré vlastnosti zachytenej snímky ako je jas, kontrast a gama. Zmenou týchto vlastností sa uľahčí ďalšie spracovanie a takto upravená snímka pokračuje do nasledujúceho podbloku.
II. Farebná filtrácia
Na upravenú snímku sa v tomto podbloku aplikujú farebné filtre, a to konkrétne červený, modrý a žltý. Obrazové prvky, ktoré nepatria daným filtrom sú týmto odstránené a snímka pokračuje do podbloku detekcie hrán.
III. Detekcia hrán
V tomto podbloku sa najprv prevedie snímka na čiernobielu a následne sa ňu aplikuje Sobelov filter na detekciu hrán. Tým získame súbory uzatvorených kriviek, ktoré vyznačujú hranice objektov či plôch. Takto upravená snímka je poslaná do ďalšieho podbloku.
IV. Odstránenie zhlukov
Potom, ako snímka prejde podblokom farebnej filtrácie a detekcie hrán, môže snímka obsahovať aj malé objekty či plochy, ktoré nie sú súčasťou dopravnej značky. Úlohou daného podbloku je tieto objekty odstrániť. Ide o určitú filtráciu snímky, kde sa odstránia len objekty, ktorých rozmery sú menšie alebo väčšie ako je nastavená hodnota.
V. Výber obrasti záujmu a jeho extrakcia
Snímka, ktorá príde na vstup tohto podbloku, obsahuje len väčšie objekty, ktoré prešli filtráciou. Úlohou podbloku je vybrať a ohraničiť oblasť záujmu. Pod pojmom oblasť záujmu (Region of Interest) rozumieme miesto, kde by sa mala potenciálne nachádzať dopravná značky. Ohraničí sa najväčší objekt, pričom rozmery ohraničenia musia byť väčšie ako nastavená hodnota. Následne sa daný ROI extrahuje z upravenej snímky, ktorá je výstupom prvého podbloku – Gama korekcia. Extrahovaný ROI predstavuje výstup bloku predspracovania.
Posledným blokom je vytvorenie vstupnej scény optického korelátora. Vstupná scéna pozostáva z referenčnej snímky a zo vstupnej snímky. Referenčná snímka zodpovedá referenčnej dopravnej značke uloženej v databáze a vstupná snímka zodpovedá výstupu bloku predspracovania. Tým, že výstupom bloku zachytenia vstupnej scény podľa GPS súradníc sú štyri snímky a každá snímka prejde blokom predspracovania, dostávame štyri výstupy. Preto sú porovnávané rozmery jednotlivých výstupov a najväčší výstup zodpovedá vstupnej snímke. Vytvorená scéna je poslaná na vstup Cambridge optického korelátora.
2.3. Cambridge optický korelátor
Cambridge optický korelátor tvorí základ navrhnutého systému. Patrí ku skupine JTC korelátorov označovaných aj ako 1/f Phase-Only Joint Transform Correlator. Výraz 1/f naznačuje použite jednoduchej OFT v oboch fázach procesu JTC. To znamená využite tej istej optiky dvakrát v procese korelácie. Výraz phase-only sa vzťahuje na obrázky zobrazované na SLM vo fáze, ktorá výrazne zvyšuje výkon systému. Hlavnou funkciu CC je porovnávanie obrazov. Na vstup optického korelátora je privedená vytvorená scéna a následne sa vykoná optická korelácia. Optický výstup (Obr. 8) sa skladá z korelačnej funkcie alebo špičky. Jej veľkosť vyjadruje mieru podobnosti nájdenú medzi porovnávanými obrazmi. Intenzita znázorňuje mieru podobnosti porovnávaných obrazov, zatiaľ čo vzájomná pozícia korelačných špičiek na výstupe vyjadruje vzájomnú polohu vstupnej a referenčnej snímky na výstupnej rovine. Najdôležitejším údajom je veľkosť korelácie medzi referenčnou a vstupnou snímkou.

Obr. 8 Optický výstup
2.4. Vyhodnotenie údajov
Posledným krokom je spracovanie a vyhodnotenie údajov získaných optickým korelátorom. Blok spracovania a vyhodnotenia výsledkov vyhodnotí údaje ako je intenzita korelačných špičiek, pomocou ktorej sa určí percentuálna zhoda medzi referenčnou a vstupnou snímkou. Ak hodnota prekročí nastavenú prahovú hodnotu , tak pomocou bloku zobrazenia výstupu sa zobrazí na displeji informácia o zhode a zobrazí sa referenčná značka.
3. Programová realizácia navrhnutého systému pomocou programového prostredia C#
Navrhnutý systém pre evidenciu zvislých dopravných značiek, ako aj experimentálna databáza, bol vytvorený pomocnou programovacieho jazyka C# a aplikáciou spoločnosti Microsoft, a to Microsoft Visual Studio 2008. Programovací jazyk, v ktorom bol naprogramovaný navrhnutý systém, bol zvolený na základe kompatibility s experimentálnym pracoviskom Cambridge optického korelátora, ktorý sa nachádza na Katedre elektroniky a multimediálnych telekomunikácií Technickej univerzity v Košiciach.
3.1. Experimentálna databáza
Prvou úlohou bolo navrhnúť experimentálnu databázu dopravných značiek pre potrebu navrhnutého evidenčného systému. Prvým krokom bolo vytvorenie videozáznamu a následne získanie všetkých potrebných informácií z daného videozáznamu, a to informácie o polohe (GPS súradnice) a typ dopravnej značky. Databáza obsahuje iba dopravné značky obsahujúce červenú, modrú a žltú farbu.
3.2. Užívateľské prostredie
Užívateľské rozhranie navrhnutého systému sa skladá z dvoch základných okien. Prvým oknom je okno Setting (Obr. 9), ktoré slúži na nastavenie počiatočných nastavení, na zadanie jednotlivých ciest k jednotlivým súborom, či zložkám, ako aj na zobrazenie údajov uložených v databáze. Okno Setting tvorí štyri bloky : Profiles, Paths, Select Sign a Database.
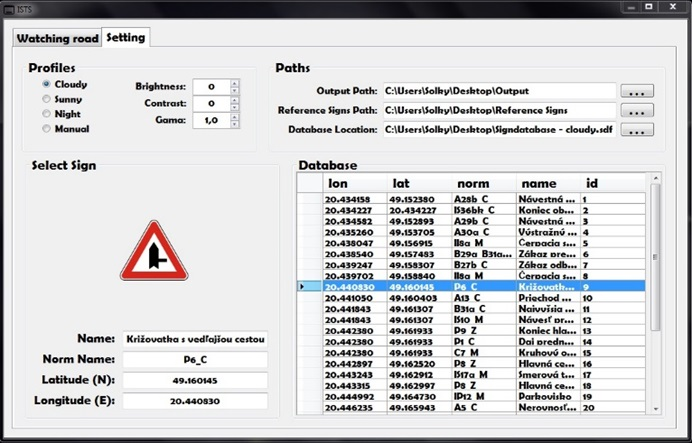
Obr. 9 Okno Setting
I. Profiles
Slúži na výber profilov, ktoré boli vytvorené pre rôzne svetelné podmienky a sú to: Cloudy, Sunny, Night a Manual. Prvé tri profily sú charakterizované špecifickými hodnotami jasu (Brightness), kontrastu (Contrast) a gamy (Gama). Pri profile Manual môže užívateľ ľubovoľne meniť jednotlivé hodnoty.
II. Paths
Slúži na výber jednotlivých ciest k jednotlivým súborom či zložkám. Pri Output Path užívateľ vyberá zložku na pevnom disku či prenosnom pamäťovom zariadení, kde sa budú ukladať jednotlivé výstupy. Reference Signs Path slúži na výber cesty ku zložke Reference Signs, kde sa nachádzajú referenčné dopravné značky. Poslednou cestou je Database Location. Tu si užívateľ vyberá konkrétnu databázu, ktorá patrí videozáznamu, ktorý chce užívateľ analyzovať.
III. Database
Zobrazuje už konkrétny obsah načítanej databázy.
IV. Select Sign
Daný blok slúži na zobrazenie jednotlivých informácií o označenej položke (referenčná dopravná značka) v databáze. Tento blok sa dá rozčleniť na dve časti. Prvou časťou je priestor, kde sa zobrazí obrázok označenej referenčnej dopravnej značky. Druhá časť je tvorená textovými poliami, ktoré zobrazujú jednotlivé informácie. Položka Name predstavuje meno dopravnej značky ako ju poznáme v praxi. Norm Name zobrazuje názov dopravnej značky podľa vyhlášky Ministerstva vnútra Slovenskej republiky. GPS súradnice referenčnej dopravnej značky predstavujú položky Latitude (N) – severná zemepisná šírka a Longitude (E) – východná zemepisná dĺžka. Druhým oknom je Watching road , kde sa vykonáva detekcia dopravnej značky zo scény na základe GPS súradníc. Dané okno obsahuje dva bloky: Video a Sign.

Obr. 10 Window Watching road
I. Video
V danom bloku sa prehráva zachytený videozáznam. Pre výber videozáznamu, ktorý má byť analyzovaný slúži tlačidlo s ikonou kamery. Po kliknutí na dané tlačidlo sa otvorí okno, kde je možné prehľadávať dáta. Kliknutím na tlačidlo s ikonou polohy sa vyberie XML súbor obsahujúci GPS súradnice, ktorý prislúcha k vybranému videozáznamu. Tlačidlo Play slúži na spustenie daného videozáznamu. Kliknutím na tlačidlo Pause sa videozáznam pozastaví a tlačidlom Stop sa videozáznam zastaví.
II. Signs
V tomto bloku sa zobrazujú rozpoznané (Video) a referenčné (Reference) dopravné značky. Blok Watching road obsahuje aj zaškrtávacie políčko Popup Window. Po jeho zaškrtnutí vyskočí okno po dobu troch sekúnd. Dané okno obsahuje šesť okien, ktoré zobrazujú celý priebeh predspracovania vstupnej scény a hľadania dopravnej značky. Okno Watching road obsahuje aj dve textové polia: Latitude (N) a Longitude (E), ktoré zobrazujú aktuálnu GPS polohu.
5. Experimenty
Jednotlivé videozáznamy, ktoré sú zachytené pri rôznych svetelný podmienkach (zamračené – Cloudy, slnečno – Sunny, noc – Night), boli analyzované vytvoreným programom. Tým sme získali sadu extrahovaných dopravných značiek, ktoré prislúchajú k jednotlivým videozáznamom. Na základe GPS súradníc jednotlivých značiek, boli značky pomocou optického korelátora typu Cambridge porovnávané s prislúchajúcimi referenčnými dopravnými značkami, ktoré sú umiestnené v databáze. Experimentálna databáza obsahuje 31 referenčných dopravných značiek. Uskutočnili sme 31 meraní pre každú sadu extrahovaných značiek. Výsledné hodnoty priemerných intenzít a percentuálna zhoda medzi niekoľkými referenčnými a extrahovanými dopravnými značkami sú zobrazené v Tabuľke 1.
Tabuľka 1 Celkový prehľad
| Videozáznam | Cloudy | Sunny | Night | |||
|---|---|---|---|---|---|---|
| Celkový počet zdetegovaných značiek | 26 | 83,9% | 23 | 74,2% | 21 | 67,8% |
| Celkový priemer intenzity (všetky značky) |
133,7 | 52,4% | 117,4 | 46% | 71,6 | 28,1% |
| Celkový priemer intenzity (detegované značky) |
159,4 | 65,5% | 158,2 | 62% | 105,7 | 41,5% |
| Prah | 40% | 40% | 25% | |||
| 20 | 76,9% | 18 | 78,3% | 16 | 76,2% | |
Jednotlivé videozáznami boli získané pri rôznych svetelných podmienkach. Tieto svetelné podmienky mali veľký vplyv na výsledné hodnoty. Z Tabuľka 1 je vidieť, že najlepšie výsledky nám vyšli pri videozázname Cloudy – zamračené. Pri analýze daného videa bolo zdetegovaný najvyšší počet dopravných značiek – 26, taktiež bol najvyšší aj celkový priemer intenzity všetkých, či len zdetegovaných dopravných značiek. Ak je nastavená prahová hodnota na 40%, dostane sa cez ňu 20 zdetegovaných dopravných značiek. Pri analýze videozáznamu Sunny – slnečno, bolo zdetegovaných 23 dopravných značiek. Celkové priemery intenzít dosahovali podobné hodnoty ako pri videozázname Cloudy. Veľký vplyv na detekciu dopravných značiek malo ostré slnko, ktoré osvetľovalo dopravné značky.
Pri danom videozázname systém nezdetegoval ani jednu dopravnú značku, ktorá obsahovala žltú farbu. Rovnakú prahovú hodnotu (40%) by presiahlo 18 dopravných značiek. Najhoršie výsledné hodnoty sme dosiahli pri videozázname Night – noc. Síce celkový počet zdetegovaných značiek bol 21, ale hodnoty celkových priemerov intenzít boli nízke, v dôsledku zlého osvetlenia dopravných značiek. Nízkej prahovej hodnote 25% by vyhovovalo 16 dopravných značiek. Okrem svetelných podmienok mala na detekciu vplyv aj kvalita zachytanej scény, ktorá závisí od rozlíšenia použitej kamery. Taktiež aj povrch samotných dopravných značiek mohol byť znečistený, ich tvar zdeformovaný a obsah nečitateľný, čo malo tiež značný vplyv na detekciu.
Záver
Tento dokument sa zaoberá návrhom evidenčného systému dopravného značenia. Toto zadanie v sebe nieslo a stále nesie veľké množstvo spôsobov riešenia. Na začiatku práce som sa zameral na optickú koreláciu , Fourierovu transformáciu ako aj optickú Fourierovu transformáciu. Vytvorený systém slúži hlavne na detekciu dopravných značiek zo zachytenej scény a plní aj funkciu kontroly dopravného značenia. Aktuálne vytvorený systém dokáže prehrávať videozáznamy, spracovávať XML súbory a komunikovať s experimentálne vytvorenými databázami, ktoré obsahujú informácie o dopravnej značke. Systém porovnáva GPS súradnice uložené v XML súbore so GPS súradnicami jednotlivých referenčných dopravných značiek uložených v databáze. V prípade zhody sa spustí proces detekcie dopravnej značky zo zachytenej scény a zobrazí zdetegovanú, ako aj referenčnú dopravnú značku. Systém taktiež dokáže zobrazovať údaje uložené v databáze.
Zoznam použitej literatúry
- J. Mihalík, J. Závadzky, and I. Gladišová, “Signály a sústavy (Návody na cvičenie)”,ELFA Košice, ISBN 80-8073-138-1, 2004.
- The University of Edinburg, School of Physics & Astronomy, [online], September 2014,
http://www2.ph.ed.ac.uk/~wjh/teaching/Fourier/documents/convolution.pdf - B.E.A. Saleh, M.C. Teich, “Fundamentals of Photonics”, ISBN 0-471-83965-5.
- Disktrétní Fourierova transformace, [online], September 2014,
< http://apfyz.upol.cz/ucebnice/down/mini/fourtrans.pdf - S.Lehar, “An Intuitive Explation of Fourier Theory“, [online], September 2014,
http://cns-alumni.bu.edu/~slehar/fourier/fourier.html - P.Ambs, “ Optical Computing, A 60-Year Adventure”. In: Advences in Optical Technologies Journal, 2010.
- J. Turán, Ľ. Ovseník, T. Harasthy, “Traffic Sign Recognition System based on Cambridge Correlator Image Comparator” – 2012.In: Carpathian Journal of Electronic and Computer Engineering. Vol. 5, no. 1 (2012), p. 127-132. – ISSN 1844 – 9689
- T. Harasthy, J. Turán, Ľ. Ovseník and K. Fazekas, “Optical correlator based Traffic Signs Recognition”, International Conference on System, Signal and Image Processing, Vienna, Austria, ISBN 978-3-200-02328-4, 2012.
Spoluautorom článku je doc. Ing. Ľuboš Ovseník, PhD., Katedra elektroniky a multimediálnych telekomunikácií, FEI TUKE, Slovenská republika

