Využitie exoskeletov v procese rehabilitácie pacientov s ochrnutím končatín
02. Február, 2015, Autor článku: Balog Peter, Elektrotechnika, Medicína
Ročník 8, číslo 2  Pridať príspevok
Pridať príspevok
![]() Článok sa zaoberá možnosťami využitia exoskeletov v armáde a predovšetkým ako perspektívnych zariadení v procese rehabilitácie pacientov s poranením miechy a chrbtice. Rehabilitačné exoskelety sú v článku rozdelené do niekoľkých kategórií a to podľa rozsahu poranenia a oblasti ich použitia v procese rehabilitácie. U pacientov so zbytkovou silou je účelom týchto zariadení precvičovanie motorických schopností, rozoznávanie zamýšľaného pohybu a poskytnutie spätnej väzby. V prípade para a tetraplegických pacientov bez zbytkovej sily majú exoskelety okrem precvičovania umožňovať vertikalizáciu a presun na rôzne vzdialenosti.
Článok sa zaoberá možnosťami využitia exoskeletov v armáde a predovšetkým ako perspektívnych zariadení v procese rehabilitácie pacientov s poranením miechy a chrbtice. Rehabilitačné exoskelety sú v článku rozdelené do niekoľkých kategórií a to podľa rozsahu poranenia a oblasti ich použitia v procese rehabilitácie. U pacientov so zbytkovou silou je účelom týchto zariadení precvičovanie motorických schopností, rozoznávanie zamýšľaného pohybu a poskytnutie spätnej väzby. V prípade para a tetraplegických pacientov bez zbytkovej sily majú exoskelety okrem precvičovania umožňovať vertikalizáciu a presun na rôzne vzdialenosti.
1. Úvod
Poranenia chrbtice a miechy sú jednou z najzávažnejších zranení. Funkčné postihnutie býva spravidla takého rozsahu, že postihnutého invalidizuje. Niektorí sú odkázaní na používanie vozíka, niektorí potrebujú pomoc ďalšej osoby a niektorí sú pripútaný na lôžko trvale. Štatistické údaje uvádzajú, že k úrazom chrbtice a miechy dochádza u 20 až 40 osôb na milión obyvateľov. Je to typický úraz mladých zdravých mužov a väčšina obetí je v produktívnom veku od 15 do 40 rokov [1]. Výsledkom poranenia miechy je ochrnutie končatín a trupu rôzneho rozsahu – vznik paraplégie (úplné ochrnutie obidvoch dolných končatín) alebo tetraplégie (úplné ochrnutie všetkých štyroch končatín).
Všeobecným cieľom rehabilitácie je plný alebo aspoň čiastočný návrat stratenej funkcie. Rehabilitácia sa vykonáva pomocou rehabilitačných zariadení. Medzi rehabilitačné zariadenia patria aj exoskelety dolných končatín. Exoskelety dolných končatín sú zariadenia, ktoré zahŕňajú väčšinu kĺbových spojení dolných končatín a majú antropomorfický (konštrukcia podobajúca sa stavbe ľudského tela) charakter. Sú prispôsobené ľudskému telu a pracujú paralelne s nim.
V minulosti robotické zariadenia boli použité iba na nahrádzanie ľudskej sily. Dnes je trendom vytvorenia tzv. osobne orientovaných robotických zariadení, do ktorých inteligenciu prinášajú ľudia a silu robotické zariadenia. Interakciou medzi robotom a jeho operátorom vyriešila integrácia ľudí a robotických zariadení do jedného systému. Táto integrácia priniesla príležitosť pre vytvorenie podporných technológií v oblasti biomedicíny, priemyslu, armády a mnoho ďalších [2]. Podľa oblasti uplatnenia sú exoskelety a aktívne ortézy rozlišované na dve veľké skupiny. Prvou veľkou skupinou sú exoskelety zvyšujúce výkonnosť, ktoré boli vyvinuté pre armádne účely. Po úspechoch s exoskeletmi zvyšujúcimi výkonnosť začali konštruktéri vyvíjať exoskelety pre medicínu. Tieto systémy pomáhajú pacientom s ochrnutými končatinami. Takto vznikla ďalšia skupina, takzvaných rehabilitačných exoskeletov.
2. Exoskelety zvyšujúce výkonnosť
Cieľom exoskeletov zvyšujúcich výkonnosť je zvýšenie pevnosti a odolnosti ľudského tela a tak uľahčiť operátorom namáhavú prácu. Tieto exoskelety neslúžia na rehabilitáciu, ale slúžia na použitie pre zdravých operátorov. Exoskelety zvyšujúce výkonnosť sú vyvíjané a používané pre armádne účely. Najvýznamnejším predstaviteľom exoskeletov zvyšujúcich výkonnosť je exoskelet BLEEX (Berkley Lower Extremity EXoskeleton). Exoskelet BLEEX (Obr. 1) je robotický systém, ktorý nosí jeho operátor a poskytuje schopnosť vykonávať ťažké úlohy s minimálnym úsilím v akomkoľvek type terénu. Táto schopnosť je dosiahnutá prostredníctvom štyroch dôležitých funkcií:
- spoľahlivá ovládacia elektronika,
- vysokovýkonné kompaktné napájacie zdroje,
- špeciálne komunikačné protokoly,
- jednoduchosť a nízka spotreba energie celej architektúry.
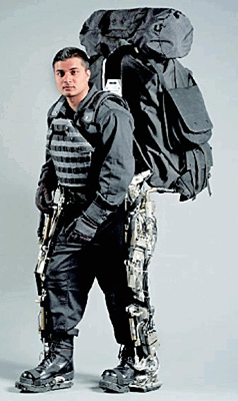
Obr. 1 Exoskelet BLEEX [3]
Systém BLEEX má antropomorfnú architektúru, čo znamená, že navrhnutý systém sa pokúsi presne zhodovať s ľudskou dolnou končatinou. Avšak, jeden z najväčších problémov je, že ľudské kĺby nie sú ľahko duplikovateľné, preto sa vývojári sústredia na dosiahnutie maximálnych stupňov voľnosti a aby exoskelety boli ľahko prispôsobiteľné k ľudskému telu. Exoskelet BLEEX sa skladá z dvoch poháňaných dolných končatín, napájacieho zdroja a batoha, ktorý slúži aj ako rám na umiestnenie užitočného zaťaženia. BLEEX nevyžaduje aktívne riadenie, ale namiesto toho napodobňuje pohyb operátora ako pár umelých nôh.
Ďalším významným exoskeletom v oblasti armády je exoskelet XOS a XOS2. Exoskelety XOS a XOS2 boli vyvíjané spoločnosťou Sarcos Research Corporation. XOS2 je vylepšená verzia exoskeletu XOS, ktorý váži len 68 kg, čo je o 10% menej ako váha exoskeletu prvej generácie. XOS2 poskytuje 17 násobné zosilnenie sily operátora a potrebuje na jeho prácu o 50% menej energie ako jeho predchodca, ktorý zároveň poskytoval iba 6 násobné zosilnenie [4].

Obr. 2 Exoskelet XOS2 [5]
3. Rehabilitačné exoskelety
Trendom súčasného návrhu a vývoja rehabilitačnej robotiky je zariadenie, ktoré by dokázalo rozoznať motorické schopnosti a zamýšľaný pohyb pacienta a dať pacientovi spätnú väzbu. Tieto zariadenia by mali asistovať pohybu pacienta len toľko, koľko je potrebné, a mali by mať rovnakú účinnosť ako kvalifikovaný terapeut. V oblasti exoskeletov existujú 2 elementárne techniky rehabilitácie. Prvá využíva riadený pohyb končatinami pacienta a druhá funkčné elektrické stimulácie (FES) svalstva končatiny. Dôležitým prvkom väčšiny rehabilitačných zariadení dolnej končatiny aplikujúcich prvú spomínanú techniku je konštrukcia podopierajúca pacienta. Podporný systém pomáha pacientovi prenášať váhu vlastného tela, a tým mu uľahčuje pohyb. Ďalej tiež zaisťuje jeho stabilitu. Strojovú podporu pri liečbe para a tetraplegických pacientov rozdeľujeme do nasledujúcich skupín:
- Zariadenie pre rehabilitáciu pohybového aparátu v horizontálnej polohe
- Zariadenie pre rehabilitáciu pohybového aparátu vo vertikálnej polohe
- Vertikalizačné rehabilitačné zariadenia, umožňujúce presun postihnutého na rôzne vzdialenosti.
3.1 Rehabilitácia v horizontálnej polohe
Pre rehabilitáciu pohybového aparátu v horizontálnej rovine sa najčastejšie používajú motorové dlahy. Motorové dlahy poskytujú pasívnu pohybovú liečbu – CPM terapiu (Continuous Passive Motion). Motorové dlahy sú určené pre liečbu kolenného, bedrového, ramenného, lakťového a členkového kĺbu. Ďalej existujú motorové dlahy na zápästia a prsty vrátane palca. Na Obr. 3 je znázornená motorová dlaha PRIMA ADVANCE, ktorá je určená pre liečbu kolenného a bedrového kĺbu.

Obr. 3 Motorová dlaha PRIMA ADVANCE [9]
Liečebná rehabilitácia pomocou motorových dláh slúži predovšetkým k zabráneniu poraneniam v dôsledku imobilizácie, ku skorému obnoveniu nebolestivého pohybu kĺbov a urýchleniu priebehu terapie s dobrým funkčným výsledkom. MOTOmed je tiež rehabilitačné zariadenie určené pre paraplegických a tetraplegických pacientov ako imobilných, tak aj pre pacientov s určitou úrovňou zbytkovej sily (Obr. 4).

Obr. 4 Zariadenie MOTOmed [10]
U imobilných pacientov ide o pasívne precvičovanie svalovo – kostrového systému, pričom dolné, resp. horné končatiny musia byť fixované pomocou ortéz. Pohyb je generovaný pomocou motora. U pacientov s určitým stupňom zbytkovej sily ide o aktívne precvičovanie funkčných svalových skupín, pričom je možná individuálna regulácia záťažového odporu.
3.2 Rehabilitácia vo vertikálnej polohe
Aby sa zabránilo škodám vznikajúcich z dôvodu imobilizácie, čo najskôr pacientov je potrebné vertikalizovať. Vertikalizácia nespočíva v sede na posteli, ale vo vertikálnej polohe v stoji. Tetraplegického pacienta vertikalizujeme na stole, stojanoch. Paraplegika v ortézach, alebo za pomoci funkčnej elektrickej stimulácie určenej pre stoj a chôdzu. Pre aktiváciu jednotlivých svalov sa používajú rehabilitačné zariadenia pre vykonávanie aktívnych a pasívnych pohybov pacienta. V súčasnej dobe je riešenie tejto problematiky na úrovni ojedinelých rehabilitačných modelov, ktoré motorovo podporujú pohyb veľkých kĺbov dolných končatín, alebo umožňujú švihovú chôdzu dolných končatín pomocou špeciálnych ortéz. Rehabilitačné zariadenia vo vertikálnej rovine je možné deliť na cBWS – cable Body Weight Support a na sBWS – structural Body Weight Support.
V systéme cBWS je pacient zavesený v bezpečnostných pásoch, kým v systéme sBWS je pacientova stabilita udržiavaná prostredníctvom ramena, ktoré podopiera pacienta v oblasti pása alebo chrbta. Často využívaným systémom v rehabilitácii sú trenažéry s motorizovaným pásom. Okrem podpornej konštrukcie sa skladajú z robotických ortéz vykonávajúcich požadovaný pohyb a bežiaceho pásu. Príkladom rehabilitačného zariadenia tohto typu je komerčne dostupný Lokomat (Obr. 5), ktorý je výsledkom práce tímu z firmy Hocoma v Zürich. Jedná sa o systém cBWS s pohybom riadeným v sagitálnej rovine (rovina rovnobežná s mediálnou rovinou, ktorá prechádza medzi končatinami) bedier a kolien. Systém obsahuje senzory sily, ktoré umožňujú kontrolu vykonávaného pohybu.

Obr. 5 Zariadenie Lokomat [11]
Príkladom rehabilitačného sBWS zariadenia je ALEX (Active Leg EXoskeleton). ALEX je motorizovaná ortéza a jeho základom je aktívna ortéza, ktorá umožňuje riadené pohyby v bedrách a v kolenách. ALEX vzniklo úpravou pasívnej ortézy GBO (Gravity Balancing leg Orthosis) [12].
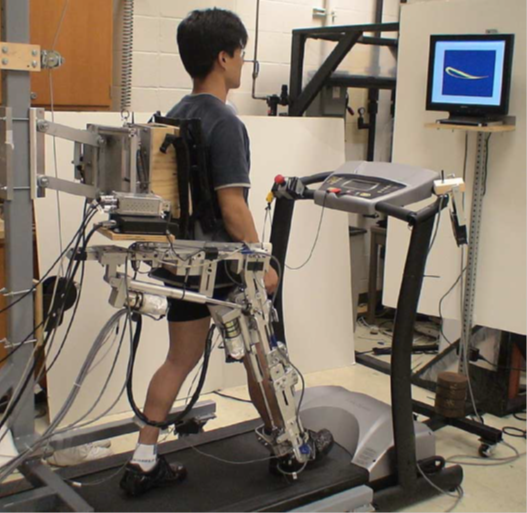
Obr. 6 Zariadenie ALEX [12]
Zariadenie ALEX bolo vyvinuté tak, aby pacientom počas rehabilitácie pomáhalo podľa potreby. Hlavnou výhodou tohto zariadenia je, že pacienti sa zúčastnia aktívnejšie na procese rehabilitácie v porovnaní s inými rehabilitačnými zariadeniami.
3.3 Vertikalizačné zariadenia, umožňujúce presun postihnutého
Cieľom tejto metódy rehabilitácie je simulácia stratenej motorickej funkcie a navodenie krokového automatizmu dolných končatín za účelom presunu postihnutého na rôzne vzdialenosti. Zámerom vertikalizačných zariadení umožňujúce presun je dostatočná mechanická a riadiaca flexibilita, pre vykonávanie každodenných pohybov, ktoré sú zhrnuté v ADL (Activity of Daily Living-činnosti bežného života). ADL je súhrn bežných činností človeka, ktorý bol definovaný pre oblasť zdravotníctva za účelom skrátenia rehabilitačného procesu a definovania zdravého životného štýlu človeka [2]. Patria tu chôdza, schádzanie alebo vychádzanie schodov, sadanie a vstávanie.
Prvé prezentované zariadenie je WalkTrainer. Jeho základom je konštrukcia opatrená kolieskami, ktorá poskytuje závesný aparát pre podopieranie pacienta. WalkTrainer je zástupcom cBWS zariadenia, ktorého súčasťou je okrem ortéz (panvové a končatinové) aj uzavretý okruh funkčnej elektrickej stimulácie. Panvová ortéza disponuje 6 stupňami voľnosti a pri aktívnej chôdzi využíva riadenie kĺbu v členku. Končatinové ortézy obsahujú senzory snímajúce kĺbové uhly (bedro, koleno, členok) a interakčné sily medzi pacientom a zariadením [2].

Obr. 7 Zariadenie WalkTrainer [13]
V roku 2008 predstavila spoločnosť Argo Medical Technologies exoskelet ReWalk. ReWalk ovláda flexiu (zmenšenie uhla medzi kosťami), extenziu (opak flexie) bedra a flexiu, extenziu kolena a pri chôdzi pacient používa barle pre udržanie rovnováhy. Pomocou senzorov umiestnených na hrudi, zariadenie deteguje uhol zvierania medzi dolnými končatinami a bedrami a adekvátne s ním reguluje postavenie dolných končatín. Použitie systému ReWalk je obmedzené na pacientov vyhovujúcich výškovým a váhovým kritériám.


Obr. 8 Exoskelet ReWalk (hore), Exoskelet REX (dole) [7] [8]
Po 8 ročnom vývoji prišla firma Rex Bionics na trh s robotickým exoskeletom REX (Robotic EXoskeleton) nahrádzajúcim manuálny invalidný vozík. Pár robotických nôh je ovládaný prostredníctvom ovládača a umožňuje chôdzu po rovine aj na schodoch a sadanie, vstávanie. Prvá verzia mala fyzické obmedzenie v podobe požiadaviek na výšku a váhu pacienta. REX je prvé zariadenie, ktoré udržiava rovnováhu pacienta s postihnutými dolnými končatinami (paraplegika) bez akejkoľvek inej pomôcky ako napríklad barle. Ďalším a zároveň najznámejším rehabilitačným exoskeletom je exoskelet HAL (Hybrid Assistive Limb). Exoskelet Hal začal vyvíjať profesor Yoshiyuki Sankai pre pacientov s poruchami chôdze. Bol navrhnutý pre podporu a rozšírenie fyzickej schopnosti jeho užívateľov, najmä ľuďom s telesným postihnutím. Existujú dve základné verzie systému: HAL 3, ktorý poskytuje podporu iba dolných končatín a HAL 5, čo je celotelový exoskelet.
HAL je určený na pomoc zdravotne postihnutým a seniorov v ich každodennej činnosti, ale môžu byť tiež použité na podporu pracovníkov, ktorí vykonajú fyzicky náročné práce, ako sú napríklad záchranné jednotky. HAL je používaný predovšetkým pre zdravotne postihnutých pacientov v nemocniciach a môže byť upravený tak, aby ho pacienti mohli použiť pre dlhodobú rehabilitáciu. Najnovšiu verziu exoskeletu je možné použiť aj pre jednu stranu tela v prípade keď je iba jedna strana tela namáhaná, alebo postihnutá.

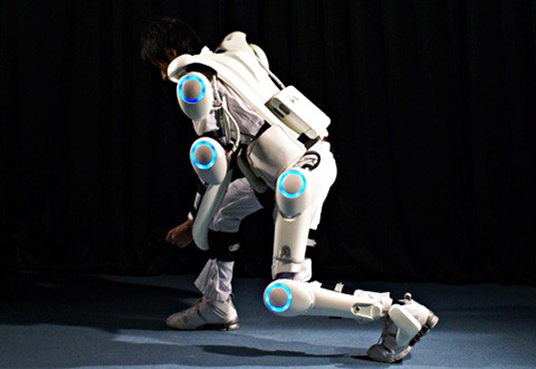
Obr. 9 Exoskelet HAL 3 (hore), HAL 5 (dole) [6]
Na ovládanie exoskeletu HAL slúžia signály nervovej sústavy pacienta. Keď sa človek pokúša urobiť pohyb, nervové signály sú odosielané z mozgu do svalov pomocou motorických neurónov. Tieto biosignály s nízkou amplitúdou môžu byť detegované na povrchu kože končatiny. HAL registruje tieto signály prostredníctvom senzora pripojeného ku koži nositeľa a na základe získaných signálov aktuátory zosilňujú požadovaný pohyb. Exoskelet HAL disponuje dvomi riadiacimi systémami. Prvý riadiaci systém je aktivovaný používateľom (CVC- Cybernic Voluntary Control), druhý systém s názvom CAC (Cybernic Autonomous Control) zodpovedný za automatickú podporu pohybu.
4. Záver
V článku sú analyzované jednotlivé zariadenia, ktoré pomáhajú ako v každodennom živote tak aj pri rehabilitácií paraplegikov. Na tieto účely sú používané exoskelety, ktoré pomáhajú operátorom, alebo pacientom v každodennom živote a sú neustále vyvíjané. V poslednej dobe technologický vývoj sprístupnil používanie oveľa menších a výkonnejších senzorov, aktuátorov a procesorov, čo priamo ovplyvnilo rýchly pokrok vo vývoji robotických exoskeletov. Rozvoj robotických exoskeletov počas posledných 10 rokov postúpil ďalej ako za predchádzajúcich 40 rokov. Niektoré oblasti ako napríklad vývoj zdrojov energie potrebujú ďalšie pokroky vo vývoji, aby prenositeľnosť súčasných exoskeletov nebola limitovaná ich relatívne vysokou spotrebou energie.
Dnes najdôležitejším faktorom pri rozvýjaní exoskeletov je bezpečnosť operátora, pacienta, ktorá zahŕňa dodržanie individuálneho prirodzeného kĺbového rozsahu a zabezpečenie jeho stability. V budúcnosti je potrebné vyriešiť dve požiadavky, aby sa exoskelety mohli stať každodennými pomôckami para alebo tetraplegikov. Prvá požiadavka je minimalizovanie spotreby, aby exoskelety boli prenositeľné na väčšie vzdialenosti a poskytovali celodennú podporu. Druhá požiadavka je prirodzenosť chôdze, aby pacienti pri nosení exoskeletov mohli žiť plnohodnotnejšie.
Zoznam použitej literatúry
- MUDr. DOLAN, I. – MUDr. ŠRÁMKOVÁ, T.: Úrazy miechy, incidencia na Slovensku a prevencia [online]. Klinika úrazové chirurgie FN Brno. 2013. Dostupné na internete:
http://www.solen.sk/pdf/c5c876b0e2ea0744c095d2d506427d02.pdf - VÍTEČKOVÁ, S. – JIŘINA, M. – KRUPIČKA, R.: Exoskelety a aktivní ortézy dolních končetin: přehled [online]. Pohybové ústrojí. 2011. ISSN: 1212-4575. Dostupné na internete:
http://www.pojivo.cz/pu/PU_34_2011.pdf - Robots: Humanoids. Dostupné na internete:
http://wordinfo.info/unit/3716/ip:4/il:R - NOSOWITZ, D.: Real-Life Iron Man Exoskeleton Gets a Slimmer, More Powerful Sequel [online]. Popular science. 2010. Dostupné na internete:
http://www.popsci.com/technology/article/2010-09/real-life-iron-man-suit-gets-sequel - MELANSON, D.: Popular Science blows out the Sarcos XOS exoskeleton [online]. Citované 11.04.2008 Dostupné na internete:
http://www.engadget.com/2008/04/11/popular-science-blows-out-the-sarcos-xos-exoskeleton/ - Cyberdyne HAL [online]. Citované 14.04.2009 Dostupné na internete:
http://www.dvice.com/archives/2009/04/cyberdyne_hal_e.php - Walk Again [online]. Dostupné na internete:
http://www.rewalk.com - Rex Bionics [online]. Dostupné na internete:
http://www.rexbionics.com - Medicínska Technika. Kolenní motorová dlaha PRIMA ADVANCE – Kinetec [online]. Citované 20.09.2013 Dostupné na internete:
http://www.medicinskatechnika.cz/kolenni-motorova-dlaha-prima-advance-kinetec-p-619.html - MOTOmed. MOTOmed including FES for active movement [online]. Citované 13.07.2013 Dostupné na internete:
http://www.motomed.com/en/models/motomed-including-fes.html - MEIER, Ch.: Rehabilitation robotics [online]. Citované 20.05.2004 Dostupné na internete:
http://web.ethlife.ethz.ch/e/articles/sciencelife/armin.html - ROBERTS, Karen, B.: Agrawal discusses role of robotic exoskeletons in stroke rehabilitation [online]. Citované 26.10.2010 Dostupné na internete:
http://www.udel.edu/udaily/2011/oct/agrawal-robotic-exoskeletons102610.html - WalkTrainer.: Mobile equipment for verticalization and locomotion [online]. Citované 19.08.2011 Dostupné na internete:
http://lsro.epfl.ch/page-34300-en.html
Spoluautorom článku je Michal Jurčišin, Katedra technológií v elektronike, Fakulta elektrotechniky a informatiky, Technická Univerzita v Košiciach, Letná 9, Košice

