Systém pre meranie malých hmotností s dotykovým riadením
24. August, 2015, Autor článku: Sýkora Ivan, Elektrotechnika
Ročník 8, číslo 8  Pridať príspevok
Pridať príspevok
![]() Príspevok je zameraný na problematiku merania hmotnosti v rozsahu niekoľko sto gramov použitím moderných snímacích prvkov a mikrokontrolérov s podporou dotykového riadenia. Úvodné pojednanie približuje problematiku MEMS snímačov v aplikáciách merania hmotnosti. V aplikácii je použitý piezorezistívny MEMS, mikrokontrolér na báze Atmel AVR a riadiaci systém FEZ HYDRA+ s dotykovým riadením.
Príspevok je zameraný na problematiku merania hmotnosti v rozsahu niekoľko sto gramov použitím moderných snímacích prvkov a mikrokontrolérov s podporou dotykového riadenia. Úvodné pojednanie približuje problematiku MEMS snímačov v aplikáciách merania hmotnosti. V aplikácii je použitý piezorezistívny MEMS, mikrokontrolér na báze Atmel AVR a riadiaci systém FEZ HYDRA+ s dotykovým riadením.
Úvod
Pre čoraz väčší dopyt po kompaktných zariadeniach a zvyšujúce sa nároky na hustotu prvkov je možné sa stretnúť s častým použitím produktov technológie MEMS v každodennej praxi. Jedná sa o mikroelektromechanické systémy, ktorých komponenty majú veľkosť od desatín do stoviek mikrometrov. Touto technológiou sú vyrábané najmä snímače, resp. prevodníky fyzikálnych veličín, pracujúcich najčastejšie na kapacitnom alebo piezorezistívnom princípe. Zložitejšie štruktúry obsahuje aj centrálnu jednotkuy, ktorá spracúva dáta a komunikuje s ostatnými komponentmi. [1]
Tenzometrické senzory obsahujú piezorezistívny kovový alebo polovodičový materiál, ktorý mení svoj odpor vplyvom pôsobiacej sily na povrch senzora. Snímacia vrstva je aplikovaná chemickou, resp. fyzikálnou depozíciou. Tenzometrické senzory sa vyrábajú v rôznych vyhotoveniach, pričom konečný typ je volený podľa cieľovej aplikácie a citlivosti senzora. Pre zlepšenie citlivosti je využívané zapojenie Wheatstoneovho mostíka. Pri aplikácii analógových senzorov sú používané prevodníky analógového signálu na digitálny s dodatočnou kalibráciou a kompenzáciou. Pre použitie na citlivé aplikácie v laboratórnych podmienkach, napríklad pre medicínske účely, sú vyrábané aj senzory s rozsahom jednotiek mikrogramov.
Základné prvky systému
Kľúčovými komponentmi realizovaného systému sú senzory zaťaženia, prevodník, mikrokontrolér a doska ovládania s dotykovým displejom pre riadenie systému. Snímacími prvkami systému sú mostíkové senzory zaťaženia FSS0005 od spoločnosti Honeywell s rozsahom 500 gramov. Elementárny senzor sa pripája pomocou 4 vodičov, dvoch napájacích a dvoch s výstupom meraného napätia. Výstup je lineárne závislý od pôsobenia sily, čím sa eliminuje nutnosť použitia štandardných metód prepočtu, ako napríklad u teplotných senzorov typu K. Regeneračný čas sa pohybuje na úrovni desatiny milisekundy. Výstupný rozsah senzora sa mení v rozmedzí ± 164 µV pri zmene ±25°C od hodnoty 25°C. [3] Rozhraním senzora so zaťažujúcim prvkom je kompozitná guľôčka s polomerom 1 mm, zaručujúc dostatočný prenos sily na plochu senzora, vysokú mieru opakovateľnosti merania a nízku hysteréziu. Stredná doba životnosti senzora je výrobcom udaná 20 miliónov cyklov. Plastové puzdro senzora odoláva trojnásobku dovoleného silového zaťaženia. Snímacia mechanická časť umožňuje vychýlenie maximálne 30 µm v smere záťaže. [3]
Prevod analógovej hodnoty výstupného napätia senzorov zabezpečuje 24-bitový prevodník AD7794 so sériovou dátovou komunikáciou a programovateľným zosilnením, pracujúci v režime ∑-∆. Pri optimálnom nastavení skreslenia a rýchlosti prevodu poskytuje 20 prevodov za sekundu. Zapojenie vstupov je diferenciálne, teda meria rozdiel napätia medzi dvoma vstupmi. [6] Pri použití externej napäťovej referencie s hodnotou 4,096 V má vstupnú citlivosť na úrovni 244 nV. Pri použití hmotnostného senzora s rozsahom 330 mV a 500 g umožňuje prevod s presnosťou 0,37 mg. Je to však len teoretická hodnota, keďže samotný senzor poskytuje citlivosť na úrovni 48,8 mg. Na prevodník je pripojená externá napäťová referencia, z ktorej sú napájané aj senzory zaťaženia. Predchádza sa tak rušeniu zo strany napájania senzorov. Prevodník obsahuje aj teplotnú kompenzáciu prevodu vzhľadom na okolitú teplotu.
Meranie ambientnej teploty je zabezpečené pomocou teplotného senzora DS18B20 s pracovnou teplotu v rozmedzí -55°C až 125°C s presnosťou ±0,5°C. Obsahuje vstavaný prevodník s prevodom teploty na 12 bitov. Pri komunikácii využíva protokol „1-Wire“, teda pre dátovú komunikáciu mu postačuje jeden vodič. Výstup senzorov určuje náročnosť celkového zapojenia v aplikácii. Pre spracovanie rôznych typov vstupov v čase je potrebné zariadenie, ktoré bude riadiť samotné spracovanie a komunikáciu s nadradeným ovládaním. Pre aplikáciu bol zvolený 8-bitový mikrokontrolér Atmel ATmega8A. [7] Prevodník je s mikrokontrolérom spojený pomocou rozhrania SPI. Mikrokontrolér vysiela požiadavku na prevod, čaká na výsledok a po jeho obdržaní ho odošle nadriadenej obsluhe v podobe zariadenia FEZ HYDRA+, ktoré zabezpečuje aj zobrazovanie údajov na dotykovom zobrazovači GHI TE35 a umožňuje riadenie zberu dát. Mikrokontrolér tiež vykonáva počiatočné inicializačné nastavenia prevodníka ako sú zosilnenie a eliminácia kmitania výstupnej hodnoty použitím tzv. „chopper“ funkcie. Výsledný prepočet je podrobený kalibračnej úprave.
Riadenie komunikácie
Komunikácia medzi zariadeniami prebieha na dvoch linkách. Medzi prevodníkom a mikrokontrolérom je využívaná obojstranná synchrónna linka. Prevodník, mikrokontrolér a nadriadené vstupno-výstupné zariadenie využívajú ako komunikačný prostriedok protokol, ktorý obsahuje adresu zariadenia, riadiace inštrukcie, výstupné dáta, stavové dáta a kontrolný súčet správnosti prijatej informácie. Komunikácia medzi mikrokontrolérom ATmega8A a nadriadeným ovládaním modulom FEZ HYDRA+ prebieha po sériovej linke USART. Mikrokontrolér na základe príkazu a parametrov zvolí metódu, ktorou žiadosť obslúži. V prípade konverzie hmotnosti je čas potrebný na vykonanie príkazu približne 120 ms pre každý z troch pripojených senzorov. Tento čas je závislý od nastavenia samotného prevodníka, rovnako ako od požadovanej presnosti prevodu. Doska prevodníka obsahuje aj teplotný senzor určený na úpravu hodnôt merania za účelom teplotnej kompenzácie. V prípade konverzie teploty je potrebný čas približne 800 ms. Mikrokontrolér čaká na odpoveď zariadenia (prevodníka AD7794 alebo snímača teploty DS18B20) a počas čakania neprijíma riadiace inštrukcie. Tento postup je zvolený z dôvodu jednoduchšej obsluhy volania, keďže odpovede zariadení sú časovo závislé a spracovanie príkazu môže spôsobiť oneskorenie s možnosťou straty dátovej synchronizácie. Ladenie konverzie a testovanie snímania hmotnosti na senzore FSS015 bolo vykonávané na osobnom počítači.
Riadenie komunikácie zabezpečuje program napísaný v objektovom jazyku podporovanom nadriadeným riadiacim systémom FEZ HYDRA+ [9], využívajúcom µC AT91SAM9RL64 s podporou spustenia aplikácií písaných na platforme .NetMicroFramework. Doska obsahuje natívnu podporu pre rozhranie Ethernet, čo z nej robí vhodného kandidáta na zariadenie s diaľkovým zberom informácií, prípadne vzdialeného ovládania. Zobrazovacie zariadenie má rozlíšenie 320×240 obrazových bodov a obsahuje rezistívnu fóliu pre dotykové ovládanie. Na hlavnú dosku sa pripája pomocou 4 konektorov, pre signál R, G, B a pre signál polohy dotyku T. Zobrazovač má možnosť využitia preddefinovaných metód vykreslenia grafických primitív ako je čiara, kruh, obdĺžnik a samotný text. Dizajn obrazovky je potom jednoducho vytvorený pomocou volaní, ktoré ponúka toto zariadenie.

Obr. 1 Riadiaci modul FEZ HYDRA+ na báze µC a dotykové zobrazovacie zariadenie TE35
Modulárna konštrukcia systému
Pri realizácii zariadenia sa vychádzalo z modulárneho princípu. Logické usporiadanie modulov zodpovedá nasledujúcej logickej schéme.
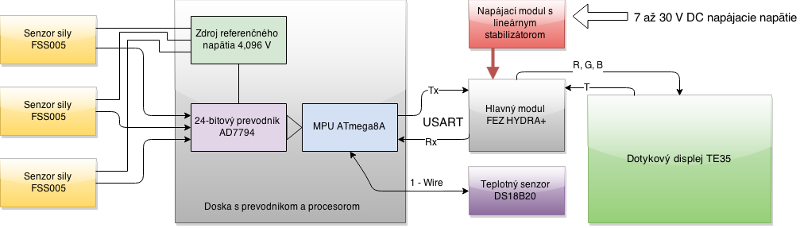
Obr. 2 Logická schéma zapojenia modulov zariadenia
Konfigurácia hmotnostných senzorov bola zvolená do trojuholníka. Senzory sa nachádzajú na podložke z tvrdeného polystyrénu o hrúbke 2 mm, podložené sú 10 mm hliníkovým profilom štvorcového prierezu. Zabezpečená je tak stabilita podložky pri pôsobení záťaže na meraciu plochu. Profily konštrukcie sú prichytené o nastaviteľné nohy pre možnosť korekcie náklonu na základe ukazovateľov na bočnej a vrchnej časti zariadenia. Ako nosný podklad pre meranie a vytvorenie referenčnej tiažovej sily na senzory je zvolená Petriho miska s priemerom 90 mm.

Obr. 3 Meracia komora zariadenia s umiestnenou Petriho miskou na senzoroch zaťaženia FSS0005
Doska s prevodníkom a mikrokontrolérom sa pripája na modul obsluhy pomocou sériového rozhrania USART. Dotykový displej je pripojený na hlavný modul pomocou konektorov, rovnako ako blok napájania zariadenia.
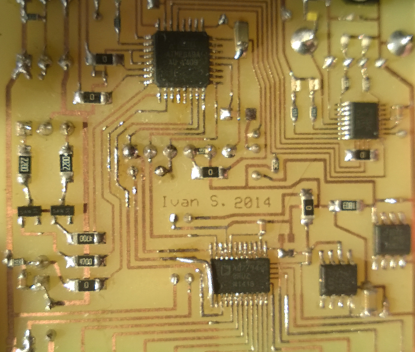
Obr. 4 Vývojový modul s AD prevodníkom AD7794, teplotným senzorom DS18B20 a podpornými obvodmi
Napájací okruh celého zariadenia je realizovaný pomocou rozhrania mini-USB ako aj pomocou 2,1mm Jack vstupu. Napájací vstup je plne funkčný v rozsahu 7 až 30 V. Obsahuje napájacie stabilizátory a automatické prepínanie medzi USB a Jack vstupom. Obsahuje stabilizátory napätia z 12 na 5 V a z 5 na 3,3 V. Doska poskytuje informácie pre hlavný modul ohľadne napájania. Pripája sa pomocou konektora typu D. Dovolené prúdové zaťaženie dosky je 1 A pri 12 V.

Obr. 5 Komerčný napájací modul systému so stabilizačnými obvodmi GHI USB Client DP
Merací priestor je prekrytý polyakrylátovým krytom, čo prispieva k eliminácii externých vplyvov na meranie. Predná časť obsahuje vysúvacie dvierka, ktoré slúžia na umiestnenie váženého predmetu do zariadenia. Pri samotnom umiestnení je potrebné ho lokalizovať približne do stredu misky. Elektronické moduly sú umiestnené vnútri hliníkového puzdra, na vrchu ktorého je umiestnený dotykový displej na ovládanie zariadenia.

Obr. 6 Celkové vyhotovenie prototypu zariadenia na snímanie hmotnosti
Pod displejom sa nachádza napájací konektor a konektor mini-USB, ktorým sa zariadenie programuje. Pri meraní sa najviac využíva funkcia TAR, teda nulovanie zobrazovanej hodnoty. Zariadenie je po inicializácii vhodné ustáliť na pracovnú teplotu. Meranie teploty sa zobrazí v ľavej časti displeja po obdržaní údajov z teplotného senzora. Ku obnovovaniu tejto hodnoty dochádza každých 30 cyklov, pričom jeden cyklus zahŕňa vyžiadanie troch prevodov, každý približne 140 ms. Teda meranie teploty je vykonávané približne raz za 15 sekúnd.
Používateľské príkazy
Príkaz TAR – uloží aktuálne zobrazenú váhu do premennej a po ďalšom meraní ju odpočíta od zobrazenej váhy. Bez ďalšieho dodatočného zaťaženia je tým zobrazená hodnota nulovaná. Uloženú hmotnosť je možné sledovať v ľavom hornom rohu po stlačení ponuky INF.
Príkaz PWR – slúži na vypnutie displeja, zastavenie konverzie vzoriek a ukončenie komunikácie s doskou prevodníka. Opätovným dotykom displeja sa zariadenie dostane do pôvodného stavu, t.j. komunikácia s doskou prevodníka a samotný prevod údajov zo senzorov.
Príkaz ATA/MTA – automatické/manuálne nulovanie hodnôt nižších ako prahová hodnota zobrazená v pravom hornom rohu displeja. Zariadenie nie je obmedzené na snímanie menších váh ako 200 mg. V režime ATA sa však zariadenie samo nuluje, aby nedochádzalo ku zobrazeniu hodnôt nižších ako táto prahová hmotnosť. V režime MTA (manuálne tarovanie) je možné merať aj menšie hmotnosti.
Príkaz INF – zobrazenie dodatočných informácií o prevode, zobrazí hodnoty výstupných napätí na senzoroch, hodnoty prevodov, ktoré slúžia na kalibráciu systému a hmotnosť na jednotlivých senzoroch. Pod teplotou sa zobrazí hodnota nulovania (tarovania výstupu), ktorá slúži na účely ladenia systému. Nasledujú údaje zo senzorov označené indexom a priemer výstupu senzorov označený „^“. V spodnej časti budú vykreslené dodatočné informácie o zariadení, type senzorov a prevodníka. Príkazy ATA a INF sú samoinvertujúce, voľba sa po opätovnom stlačení implicitne mení na opačnú. Displej sa vykresľuje každých 25 ms.
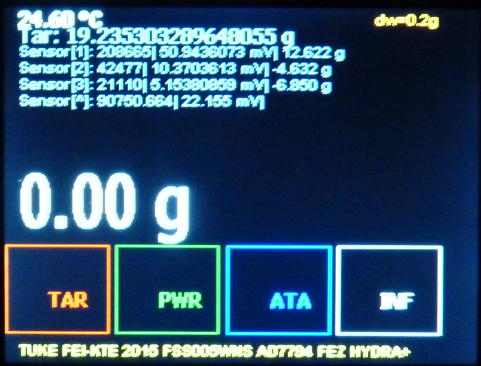
Obr. 7 Zobrazenie doplnkových informácií na dotykovom zobrazovači GHI TE35
Výsledok je zobrazený na dve desatinné miesta, pričom pre hmotnosti pod jeden gram sa toto číslo násobí a výsledok sa zobrazuje v miligramoch opäť na dve desatinné miesta. Displej má na povrchu rezistívnu fóliu, ktorá lepšie reaguje na bodový dotyk plastovým predmetom malého priemeru. Kalibrácia bola vykonaná na základe známych hodnôt zaťaženia. Meranie bolo uskutočnené v rozsahu 500 mg až 120 g. Z nameraných hodnôt a ich priemerov boli vypočítané koeficienty v prostredí MATLAB použitím funkcií polyfit a polyval. Výsledné koeficienty sú potom dosadené do rutiny pre výpočet váhy v hlavnom module FEZ HYDRA+.

Obr. 8 Graf korelácie výstupu senzorov pri známej hmotnosti
Záver
Predmetom práce je vývojová konštrukcia laboratórneho zariadenia pre snímanie malých hmotností s použitím moderných snímacích prvkov na báze MEMS a dotykového riadenia. Východiskovými požiadavkami bol merací rozsah rádovo stovky gramov, citlivosť rádovo desatiny gramu a modulárna konštrukcia. Použitá je konfigurácia troch senzorov zaťaženia Honeywell FSS0005, pripojených na 24-bitový ∑-∆ AD prevodník AD7794. Spracovanie údajov zabezpečuje 8-bitový mikrokontrolér Atmel ATmega8A, komunikujúci s nadriadeným systémom FEZ HYDRA+, obsluhujúcim dotykový farebný maticový zobrazovač. Potenciál takéhoto riešenia je v možnosti jednoduchých úprav obslužného softvéru a implementácie doplnkových funkcií.
Zoznam použitej literatúry
- Waldner, Jean-Baptiste (2008). Nanocomputers and Swarm Intelligence. London: ISTE John Wiley & Sons. Str. 205. ISBN 1-84821-009-4.
- Automation and robotics [online] 2015 [cit. 2015-04-20] Dostupné na internete:
http://www.southampton.ac.uk/~rmc1/robotics/artactile.htm - FSS005WNGB senzor sily [online] 2015 [cit. 2015-04-20] Dostupné na internete:
http://pdf1.alldatasheet.com/datasheet-pdf/view/533069/HONEYWELL/FSS005WNGB.html - Sensor Connections [online] 2015 [cit. 2015-04-29] Dostupné na internete:
http://info.bannerengineering.com/cs/groups/public/documents/literature/136214.pdf - DS18B20 [online] 2015 [cit. 2015-04-20] Dostupné na internete:
http://datasheets.maximintegrated.com/en/ds/DS18B20.pdf - AD7794 24-bit AD Converter [online] 2015 [cit. 2015-04-20] Dostupné na internete:
http://www.analog.com/media/en/technical-documentation/data-sheets/AD7794_7795.pdf - ATmega8A MCU/MCP [online] 2015 [cit. 2015-04-20] Dostupné na internete:
http://www.atmel.com/Images/Atmel-8159-8-bit-AVR-microcontroller-ATmega8A_datasheet.pdf - How delta-sigma ADCs work, Part 1[online] 2015 [cit. 2015-04-20] Dostupné na internete:
http://www.ti.com/lit/an/slyt423/slyt423.pdf - FEZ HYDRA+ [online] 2015 [cit. 2015-04-20] Dostupné na internete:
https://www.ghielectronics.com/catalog/product/530 - Typ rozhraní FEZ [online] 2015 [cit. 2015-04-20] Dostupné na internete:
http://gadgeteer.codeplex.com/wikipage?title=.NET%20Gadgeteer%20Socket%20Types&referringTitle=Documentation
Spoluautorom článku je Ing. Slavomír Kardoš, PhD., Katedra technológií v elektronike, FEI TU v Košiciach, Park Komenského 4, 04200 Košice

