Rehabilitácia dolných končatín
13. Jún, 2016, Autor článku: Balog Peter, Elektrotechnika
Ročník 9, číslo 6  Pridať príspevok
Pridať príspevok
![]() V článku je popísaný postup návrhu a realizácie funkčného modelu pre rehabilitáciu dolných končatín z hardvérového a softvérového hľadiska. Navrhnutý model umožní nastaviť terapeutovi optimálny rehabilitačný proces pre každého pacienta individuálne.
V článku je popísaný postup návrhu a realizácie funkčného modelu pre rehabilitáciu dolných končatín z hardvérového a softvérového hľadiska. Navrhnutý model umožní nastaviť terapeutovi optimálny rehabilitačný proces pre každého pacienta individuálne.
Úvod
Poranenia chrbtice a miechy sú jednou z najzávažnejších zranení. Funkčné postihnutie býva spravidla takého rozsahu, že postihnutého invalidizuje. Niektorí sú odkázaní na používanie vozíka, niektorí potrebujú pomoc ďalšej osoby a niektorí sú pripútaný na lôžko trvale. Štatistické údaje uvádzajú, že k úrazom chrbtice a miechy dochádza u 20 až 40 osôb na milión obyvateľov. Je to typický úraz mladých zdravých mužov a väčšina obetí je v produktívnom veku od 15 do 40 rokov [1]. Výsledkom poranenia miechy je ochrnutie končatín a trupu rôzneho rozsahu.
Všeobecným cieľom rehabilitácie je plný alebo aspoň čiastočný návrat stratenej funkcie. Včasná a komplexná rehabilitácia pacientov so správnou aplikáciou pohybovej rehabilitačnej liečby a kompenzačných pomôcok skracuje hospitalizačnú fázu rehabilitácie. Liečebná rehabilitácia s jej jednotlivými stupňami, príslušnými polohovými a pohybovými prvkami, s psychologickou intervenciou, dokonalou ošetrovateľskou starostlivosťou značne ovplyvňuje konečný efekt liečby. K pohybovým prvkom v rámci liečebnej rehabilitácie patrí vykonávanie pasívnych pohybov a postupné zaraďovanie aktívnych pohybov do rehabilitačného programu. Požadované pohyby sú vykonávané pomocou rehabilitačných zariadení [2]. V poslednej dobe technologický vývoj sprístupnil používanie oveľa menších a výkonnejších senzorov, aktuátorov a procesorov, čo priamo ovplyvnilo rýchly pokrok vo vývoji rehabilitačných zariadení.
Trendom súčasného návrhu a vývoja rehabilitačnej robotiky je zariadenie, ktoré dokáže obnoviť stratené motorické funkcie pacienta. Tieto zariadenia by mali mať rovnakú účinnosť ako kvalifikovaný terapeut. V oblasti rehabilitačnej robotiky existujú 2 elementárne techniky rehabilitácie. Prvá využíva riadený pohyb končatinami pacienta a druhá funkčné elektrické stimulácie (FES) svalstva končatiny.
Pre precvičovanie pohybového aparátu a navodenie krokového automatizmu chôdze sa najčastejšie používaná prvá spomínaná technika. Základnými rehabilitačnými zariadeniami pre riadený pohyb končatinami sú motorové dlahy. Motorové dlahy poskytujú kontinuálnu pasívnu pohybovú terapiu – CPM (Continous Passive Motion) terapiu. Motorizované zariadenie CPM postupne vykonáva pohyby postihnutou končatinou pacienta podľa predpísaného uhla a rýchlosti počas dlhšieho časového obdobia [3]. V konečnom dôsledku CPM terapia zvyšuje pohyblivosť kĺbov a rozsah pohybov, pričom pomáha znížiť komplikácie vzniknuté z dôvodu imobilizácie, ako stuhnutosť svalov a kĺbov. CPM terapiu poskytujú zariadenia napr.: Prima Advance a MOTOmed. Tieto zariadenia sú používané hlavne v prvej fáze rehabilitácie. Motorová dlaha Prima Advance je určená pre liečbu kolenného a bedrového kĺbu. Liečebná rehabilitácia pomocou zariadenia Prima Advance slúži predovšetkým k zabráneniu poraneniam v dôsledku imobilizácie, ku skorému obnoveniu nebolestivého pohybu kĺbov a urýchleniu priebehu terapie s dobrým funkčným výsledkom [4].

Obr. 1 Rehabilitačné zariadenie Prima Advance [4]

Obr. 2 Rehabilitačné zariadenie MOTOmed [6]
Liečba pomocou pohybového prístroja MOTOmed je určená vozičkárom, osobám so zníženou schopnosťou chôdze a osobám dlhodobo pripútaných na lôžko. U imobilných pacientov ide o pasívne precvičovanie svalovo – kostrového systému, pričom dolné, resp. horné končatiny musia byť fixované pomocou ortéz. Pohyb je generovaný pomocou motora [5]. U pacientov s určitým stupňom zbytkovej sily ide o aktívne precvičovanie funkčných svalových skupín, pričom je možná individuálna regulácia záťažového odporu.
Rehabilitačné zariadenia poskytujú tri hlavné metódy terapie podľa stavu pacienta. Prvá je pasívna terapia, pri ktorej zariadenie pomocou motora rozhýbe a uvoľní pacientove končatiny. Druhá je podporná terapia, pri ktorej pohyby pacienta sú podporované motorom. Posledná je aktívna terapia, pri ktorej pacient pohybuje vlastnou silou proti jemne nastaviteľnému odporu.
Návrh a realizácia
Pre účely simulácie rehabilitácie dolných končatín bol realizovaný funkčný model, ktorý poskytuje rôzne možnosti nastavenia na dosiahnutie optimálnej rehabilitácie pre každého pacienta individuálne a umožňuje rehabilitáciu v horizontálnej a vertikálnej polohe. Medzi hlavnými parametrami zariadenia patrí nastavenie maximálneho uhla flexie/extenzie a rýchlosť pohybu individuálne pre bedrový a kolenný kĺb. Nevýhodou motorových dláh ako napr.: Prima Advance a MOTOmed sú nedostatočná extenzia bedrového kĺbu a spojený pohyb bedrového a kolenného kĺbu. Všeobecným cieľom rehabilitačných systémov je zabezpečiť dostatočný rozsah pohybov, ktoré sú potrebné na vykonávanie každodenných pohybov. Nedostatočná extenzia bedrového kĺbu je spôsobená tým, že rehabilitácia je vykonávaná v horizontálnej rovine. Ako je znázornená na Obr. 3. počas prirodzenej chôdze bedrový kĺb okrem flexie vykonáva aj 10-20 stupňovú extenziu.
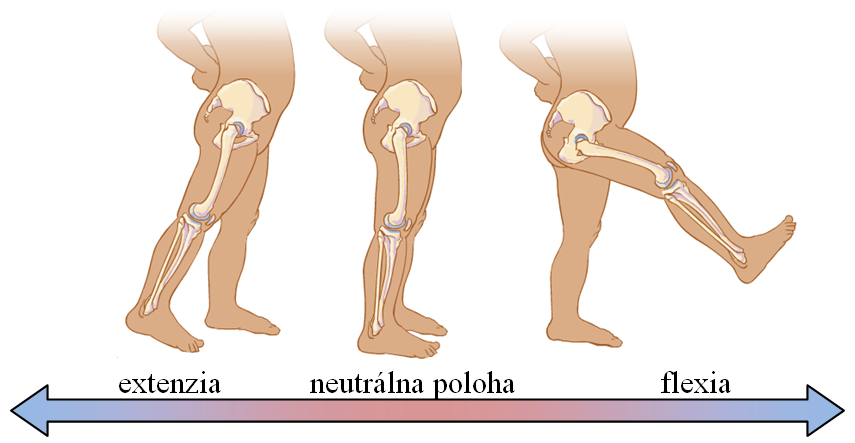
Obr. 3 Znázornenie extenzie/flexie bedrového kĺbu [7]
Spojený pohyb bedrového a kolenného kĺbu bol riešený dvomi aktuátormi, ktoré umožňujú individuálny pohyb jednotlivých kĺbov. Samostatné aktuátory a riadiace elektroniky ponúkajú individuálne ovládanie kĺbov pomocou počítača.
Samotná konštrukcia zariadenia sa skladá z hliníka a ocele. Z ocele sú realizované uchytenie jednotlivých aktuátorov a fixačná doska pomocou ktorej je možné konštrukciu upevniť k stolu v prípade vertikálnej, alebo k postele v prípade horizontálnej rehabilitácie. Konštrukcia predkolennej a stehennej časti nohy bola realizovaná z hliníkových profilov, ktoré sú nastaviteľné podľa dĺžky nohy. Hliník bol použitý kvôli ľahkej váhe a vďaka zvolenému profilu poskytujú dostatočnú pevnosť. V neposlednom rade slúži aj ako spojenie medzi jednotlivými aktuátormi zariadenia (Obr. 4).
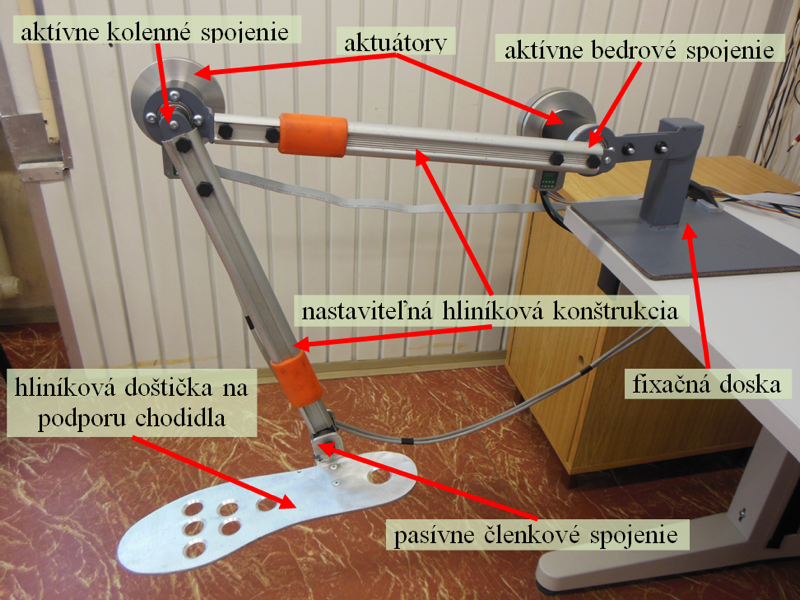
Obr. 4 Konštrukcia funkčného modelu
Navrhnutý model poskytuje 3 stupne voľnosti (každý kĺb má jeden stupeň voľnosti) v smere sagitálnej roviny (paralelná rovina s rovinou, ktorá prechádza stredom ľudského tela odhora až nadol a rozdeľuje ho na pravú a ľavú identickú polovicu). Členkové spojenie je pasívne, kým bedrové a kolenné sú aktívne poháňané. Pasívne členkové spojenie je vybavené mechanickou pružinou, ktorá vráti doštičku chodidla do neutrálnej polohy v prípade nezaťaženia.
Ako aktuátory sú použité BLDC motory (BrushLess Direct Current motor- bezkefový jednosmerný motor) vybavené lineárnym dvojkanálovým enkodérom o rozlíšení 1024 impulzov za otáčku. Boli vybraté ploché motory od firmy Maxon o výkone 90W. Ploché motory sú pomalšie v porovnaní s klasickým vyhotovením, ale na druhej strane poskytujú väčší krútiaci moment, čo je ideálne pre takúto aplikáciu. Ďalším argumentom v prospech plochého motora bola jeho dĺžka kvôli ľahšiemu umiestneniu. Motory spolu s planetárnou prevodovkou s prevodom 150:1 poskytujú dostatočnú silu a krútiaci moment na vykonávanie požadovaných pohybov. Planetárne prevodovky od firmy Maxon sú vybavené keramickými prevodmi, čo znižuje trenie medzi ozubenými kolesami a tým zväčšuje efektivitu celej prevodovky. Keramické prevody vďaka veľkej efektivite umožňuje používať motory s menším výkonom (Obr. 5).
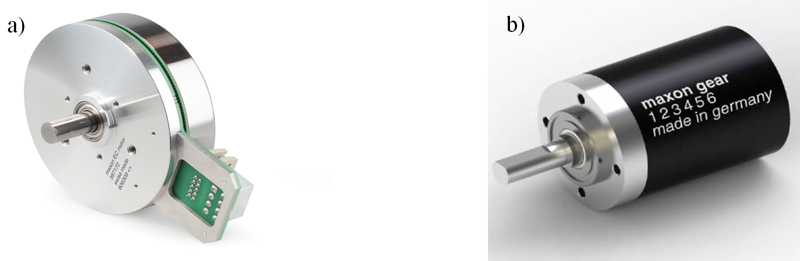
Obr. 5 a) Maxon EC90 plochý BLDC motor s integrovaným enkodérom, b) Maxon GP52 planetárna prevodovka
Kvôli zvýšeniu bezpečnosti bolo potrebné používať mechanickú brzdu na zastavenie rozbehnutých pohybov v prípade výpadku elektriny. Ako mechanická brzda slúži elektromagnetický solenoid zapojený v inverznom režime. V prítomnosti napájacieho napätia jadro solenoidu je zatiahnuté, kým v prípade výpadku elektriny vhodne nastavená pružina pritlačí silikónovú podložku k vonkajšiemu rotoru motora. Vďaka veľkým prevodom na zabrzdenie rehabilitačného modelu cez motor stačí malá sila.
Prostredím LabWindows/CVI bol vytvorený softvér umožňujúci nastaviť požadované parametre. Cieľom bolo vytvoriť grafické užívateľské rozhranie, ktoré zabezpečuje všetky základné nastavovacie funkcie a poskytuje jednoduché ovládanie. Medzi základné nastavenia patria rýchlosť a maximálne uhly flexie/extenzie bedrového a kolenného kĺbu. Okrem toho umožňuje terapeutovi okamžite zastaviť pohyb v prípade potreby a nastaviť funkčný model do východiskovej pozície. Funkčný rehabilitačný modul je vybavený aj vedľajšími nastaveniami pohybu ako zrýchlenie a spomalenie (Obr. 6).
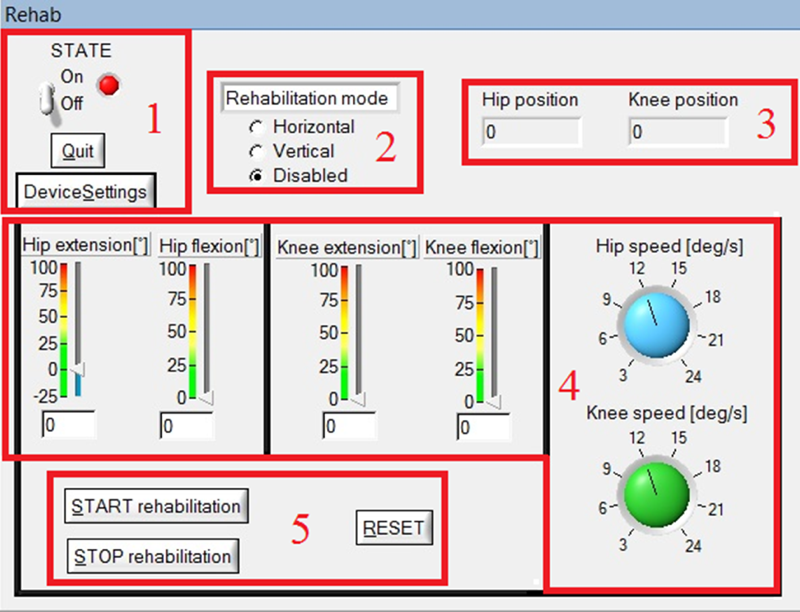
Obr. 6 Grafické užívateľské rozhranie funkčného modelu
Popis obrázku: 1- základné komunikačné nastavenia, 2- výber rehabilitačného režimu, 3- aktuálne pozície bedra a kolena, 4- nastavenia pohybu, 5- ovládacie tlačidlá.
Záver
Funkčný model môže byť použitý na simuláciu jednotlivých krokov chôdze a tvorí základ vertikálneho rehabilitačného zariadenia umožňujúceho presun pacienta. Prídavným zaťažením je možné nasimulovať pohyby, ktoré sú vykonávané v procese rehabilitácie. Hlavným cieľom bola simulácia rehabilitačného procesu, pomocou ktorého je možné analyzovať základné fázy rehabilitácie. Grafické užívateľské rozhranie poskytuje základné nastavovacie funkcie aktuátorov, ktoré v ďalšom môžu byť rozšírené podľa potreby. Nastavený pohyb s nastavenými vedľajšími parametrami je vykonaný cyklicky až kým ho užívateľ nezastaví manuálne.
Zoznam použitej literatúry
- SCHÜTKE, E.: Spinal cord injury. Encyclopædia Britannica. Encyclopædia Britannica Online. Encyclopædia Britannica Inc. citované: 09. 09. 2014. [online]. Dostupné na internete:
http://www.britannica.com/science/spinal-cord-injury - GÚTH, A., LÁNIK, V.: Liečebná rehabilitácia. Rehabilitácia, Vol. 46, No. 1, 2009, str.: 3-8, ISSN: 0375-0922
- SALTER, R.: The sooner the joint is moved, the better [online]. Kinetec. Dostupné na internete:
http://kinetec.fr/en/kinetec-selection/cpm-continuous-passive-motion/traitement-cpm.html - MEDICÍNSKA TECHNIKA.: Kolenní motorová dlaha PRIMA ADVANCE – Kinetec [online]. Citované 20.09.2013. Dostupné na internete:
http://www.medicinskatechnika.cz/kolenni-motorova-dlaha-prima-advance-kinetec-p-619.html - MOTOmed.: MOTOmed including FES for active movement [online]. Citované 13.07.2013. Dostupné na internete:
http://www.motomed.com/en/models/motomed-including-fes.html - RECK.: Pohybové léčebné přístroje MOTOmed [online]. Dostupné na internete:
http://www.motomed.cz/medizin_01_de/themen_01_de/start_01/fset_start_01.html - Aboutkidshealth.: Hip Flexion-Extension, Dostupné na internete:
http://www.aboutkidshealth.ca/en/howthebodyworks/introductiontotheskeleton/hipjointmovements/
Spoluautorom článku je Stanislav Slosarčík, Katedra technológií v elektronike, Fakulta elektrotechniky a informatiky, Technická univerzita v Košiciach, Park Komenského 2, 040 01 Košice

